Part 1: Power of Diffusion Models
In this section, a pretrained diffusion model
(DeepFloyd IF)
is utilized to perform various image generation and processing tasks without any fine-tuning.
1.1 DeepFloyd IF — Pretrained Diffusion Model
DeepFloyd IF is a two-stage text-to-image diffusion model developed by Stability AI. The first stage
generates images at 64×64 resolution, while the second stage upsamples these outputs to
256×256. Since the model cannot directly accept raw text strings, prompts must first be encoded
into embeddings — high-dimensional vectors (4096-dimensional in this case) that the model can process.
A HuggingFace pipeline
is used to convert text prompts into embeddings, which are saved as
.pth files and passed as input to DeepFloyd IF.
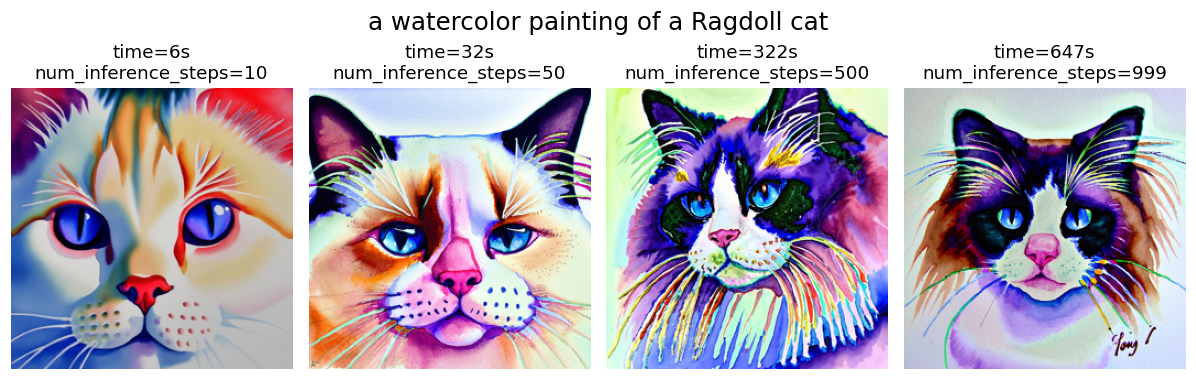
Figure 1 shows images generated from text prompts with varying numbers of inference steps
(num_inference_steps) and their corresponding execution times. Since the model is trained
over 1000 discrete timesteps, the maximum value of num_inference_steps used here is 999.
As expected, a low step count yields images of noticeably lower quality. Increasing
num_inference_steps progressively adds finer details and textures to the output, but also
increases execution time linearly. Beyond 500 steps, the execution time is doubled while
the improvement in visual quality becomes marginal.
1.2 Diffusion Model Denoising
Starting from a clean image \(x_0\), noise is iteratively added to produce progressively
noisier versions \(x_t\), until pure noise is reached at timestep \(t = T\) (\(T=1000\) in this study).
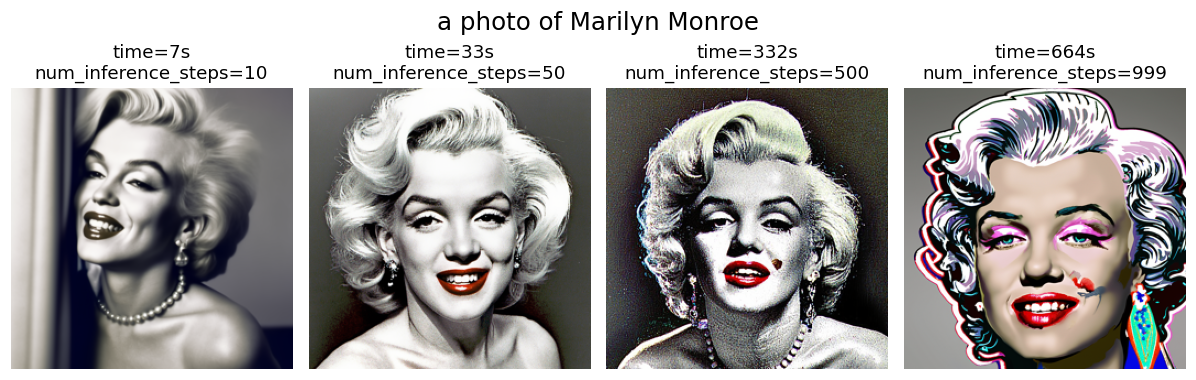
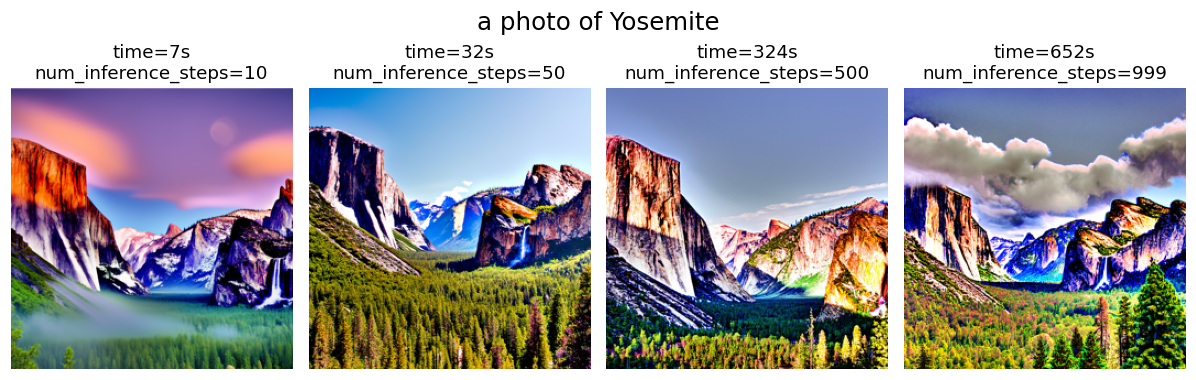
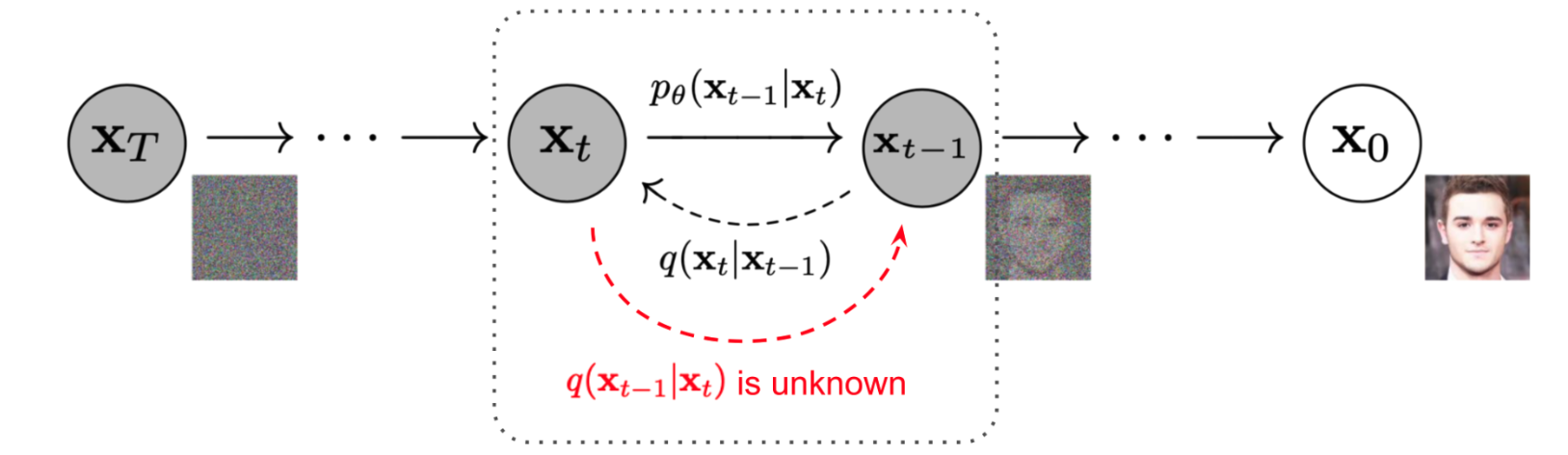
A diffusion model learns to reverse this process, as shown in Figure 2. Given a noisy image \(x_t\)
and the timestep \(t\), the model predicts the noise present in the image. Using this prediction, the noise can either be
fully removed to obtain a direct estimate of \(x_0\), or partially removed to obtain an estimate of
\(x_{t-1}\) with slightly less noise.
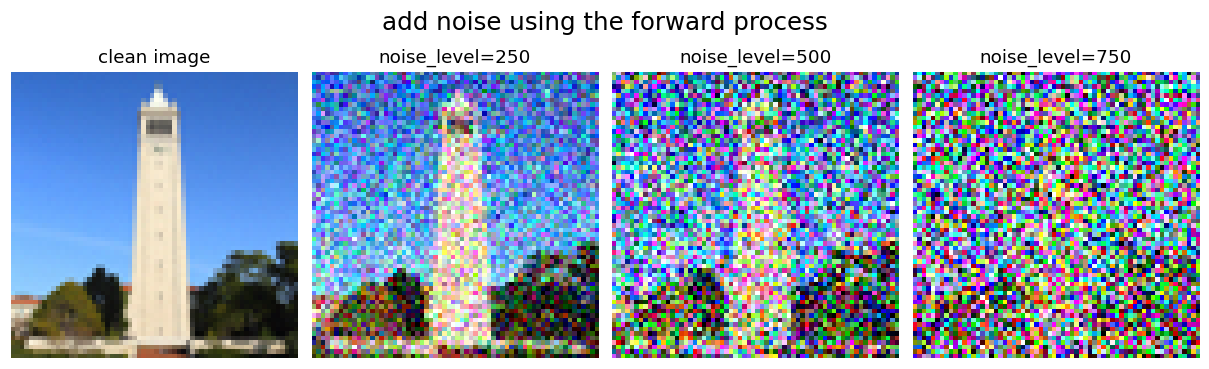
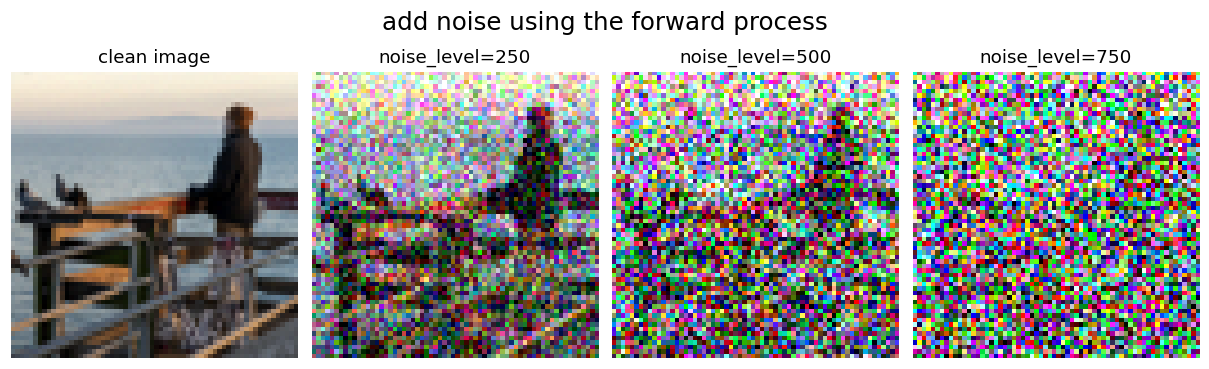
1.2.1 The Forward Process
The forward process corrupts a clean image by progressively adding Gaussian noise, as defined by:
\[ q(x_t \mid x_0) = \mathcal{N}(x_t;\ \sqrt{\bar{\alpha}_t}\, x_0,\ (1 - \bar{\alpha}_t)\mathbf{I}) \tag{1.1} \]
which is equivalent to computing:
\[ x_t = \sqrt{\bar{\alpha}_t}\, x_0 + \sqrt{1 - \bar{\alpha}_t}\, \epsilon \quad \text{where } \epsilon \sim \mathcal{N}(0, \mathbf{I}) \tag{1.2} \]
That is, given a clean image \(x_0\), we get a noisy image \(x_t\) at timestep \(t\) by sampling from a
Gaussian with mean \( \sqrt{\bar{\alpha_t}}x_0 \) and variance \( (1-\bar{\alpha_t}) \). The \(\bar\alpha_t\)
is from the pretrained diffusion model variable
alphas_cumprod. Note that \(t=0\) corresponds to a clean image and larger \(t\) corresponds to more noise; consequently, \(\bar{\alpha}_t\) approaches 1 for small \(t\) and 0 for large \(t\).
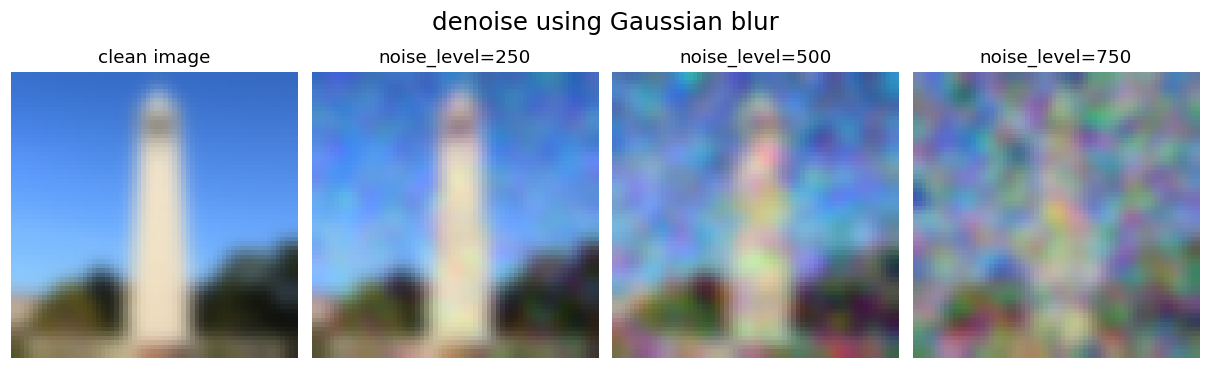
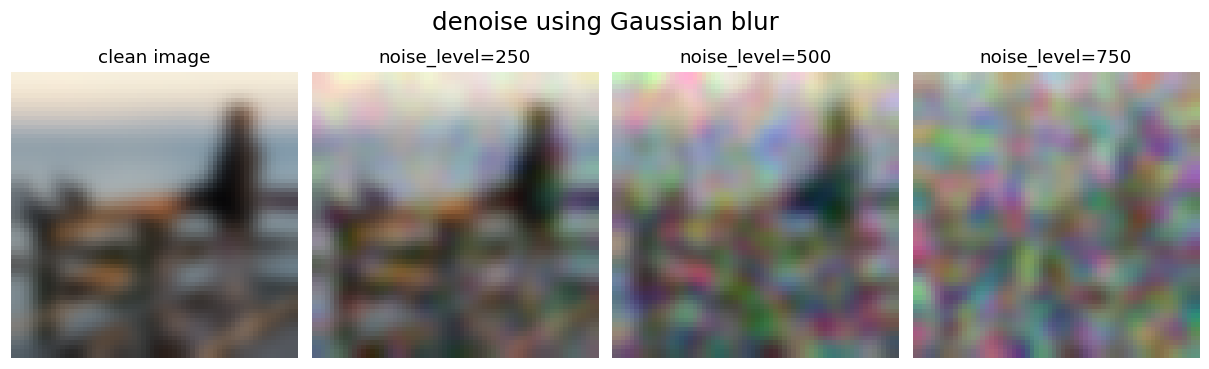
1.2.2 Classical Denoising: Gaussian Blur Baseline
Gaussian blur is a classical image smoothing technique that convolves the image with a Gaussian
kernel, replacing each pixel with a weighted average of its neighbors. The standard deviation
\(\sigma\) controls the blur strength — a larger \(\sigma\) removes more noise but also loses
more detail. It is applied here as a simple baseline for comparison against the diffusion-based
denoiser, using sigma = 2 and kernel_size = 13 to cover over 99% of
the Gaussian density.
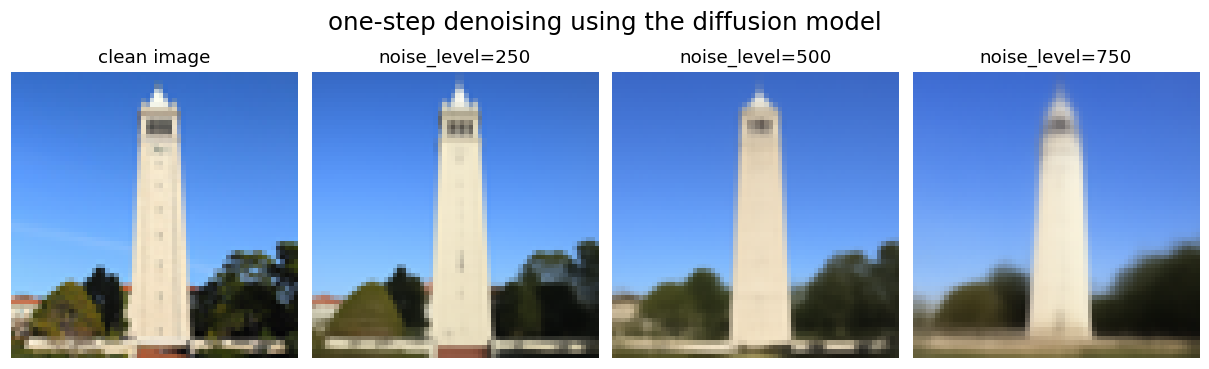
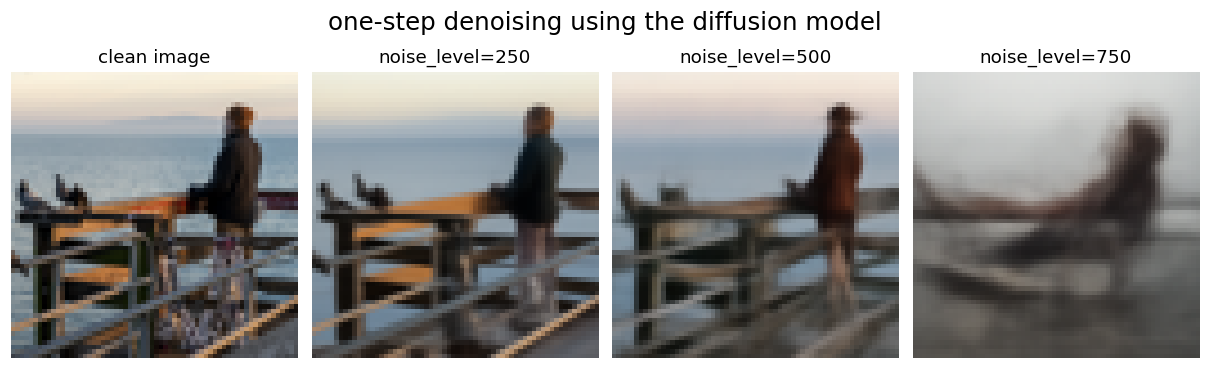
1.2.3 One-step Denoising Using the Diffusion Model
The denoiser of the pretrained DeepFloyd model is accessible via stage_1.unet, a UNet
trained on a large dataset of \((x_0, x_t)\) image pairs. The UNet is conditioned on the noise level
by taking the timestep \(t\) as an additional input. Since the model was trained with text conditioning,
a neutral prompt embedding ("a high quality photo") is used. The one-step denoising
procedure is as follows: first, Gaussian noise is added to the clean image at a given timestep \(t\);
the noisy image, timestep, and prompt embedding are then passed to stage_1.unet to
estimate the noise; finally, the estimated noise is subtracted to recover a clean estimate of \(x_0\).
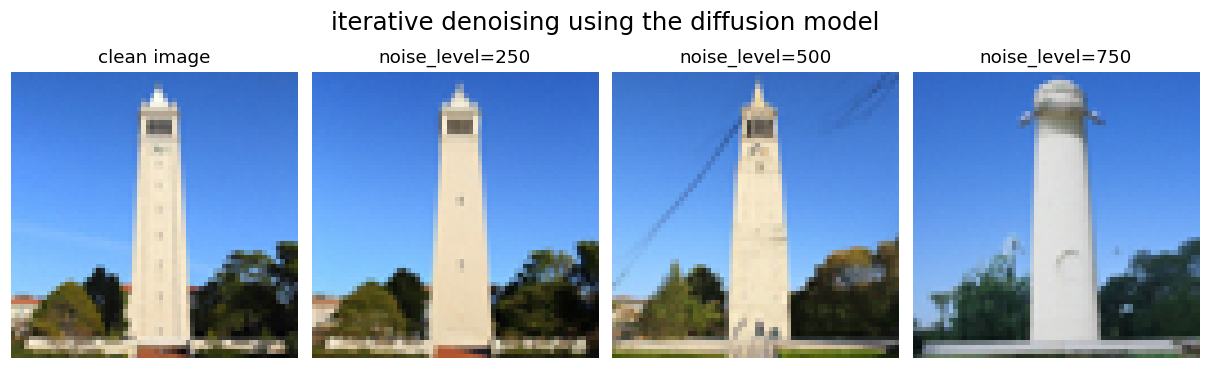
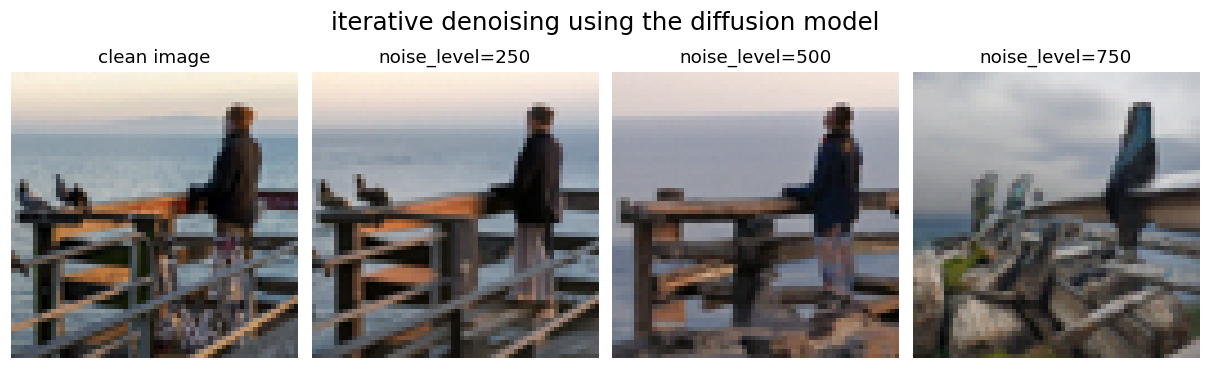
1.2.4 Iterative Denoising Using the Diffusion Model
Unlike one-step denoising, diffusion models are designed to denoise iteratively. In principle,
one could start from pure noise \(x_T\) at timestep \(T = 1000\), denoise one step at a time to
obtain \(x_{999}, x_{998}, \ldots\), and continue until reaching \(x_0\). However, this requires
running the UNet 1000 times, which is computationally expensive. In practice, inference can be
accelerated by skipping timesteps — a technique justified by the connection between diffusion
models and differential equations, which allows larger steps without significant loss in quality.
To skip steps, a reduced list of timesteps strided_timesteps is constructed, much
shorter than the full 1000-step sequence. strided_timesteps[0] corresponds to the
largest \(t\) (the noisiest image) and strided_timesteps[-1] corresponds to \(t = 0\)
(the clean image). A uniform stride of 30 works well in practice.
At the \(i\)-th denoising step, the current timestep is \(t = \)strided_timesteps[i]
and the target is \(t' = \)strided_timesteps[i+1], stepping from noisier to cleaner.
The transition is given by:
\[ x_{t'} = \frac{\sqrt{\bar{\alpha}_{t'}}\,\beta_t}{1 - \bar{\alpha}_t}\, x_0 + \frac{\sqrt{\alpha_t}(1 - \bar{\alpha}_{t'})}{1 - \bar{\alpha}_t}\, x_t + v_\sigma \tag{1.3} \]
where:
- \(x_t\) — the image at timestep \(t\)
- \(x_{t'}\) — the image at timestep \(t' < t\) (less noisy)
- \(\bar{\alpha}_t\) — defined by
alphas_cumprod, as described above
- \(\alpha_t = \bar{\alpha}_t / \bar{\alpha}_{t'}\)
- \(\beta_t = 1 - \alpha_t\)
- \(x_0\) — the current clean image estimate, obtained as in the previous section
The term \(v_\sigma\) is a predicted noise variance term. In DeepFloyd, this is predicted by the
model itself and added via the supplied add_variance function.
1.2.5 Denoising Results
Two 64×64 images — Sather Tower and an old man facing the sea — are used to evaluate the
denoising methods, as shown in Figures 3 and 4. Each clean image is first corrupted using the
forward process at noise levels (timesteps) of 250, 500, and 750, then denoised using three
methods: Gaussian blur, one-step diffusion denoising, and iterative diffusion denoising
(top to bottom in the figures).
Gaussian blur performs poorly at recovering image content. Because the forward process removes
fine structural details, and Gaussian blur only smooths pixel values, it cannot reconstruct
high-frequency structures. The diffusion model, by contrast, recovers these details effectively.
At low to moderate noise levels, the one-step denoiser restores plausible images with sharp
details. However, at high noise levels (e.g., timestep 750), too much information is lost and
the model begins to hallucinate content inconsistent with the original.
Iterative denoising further improves reconstruction quality at lower noise levels, producing
sharper and more detailed results than one-step denoising at timesteps 250 and 500. However, it
also tends to hallucinate more at higher noise levels. For example, in Figure 3 at timestep 750,
the reconstructed image no longer resembles a tower, and in Figure 4 at timestep 500, the
clothing and hat of the old man differ noticeably from the original.
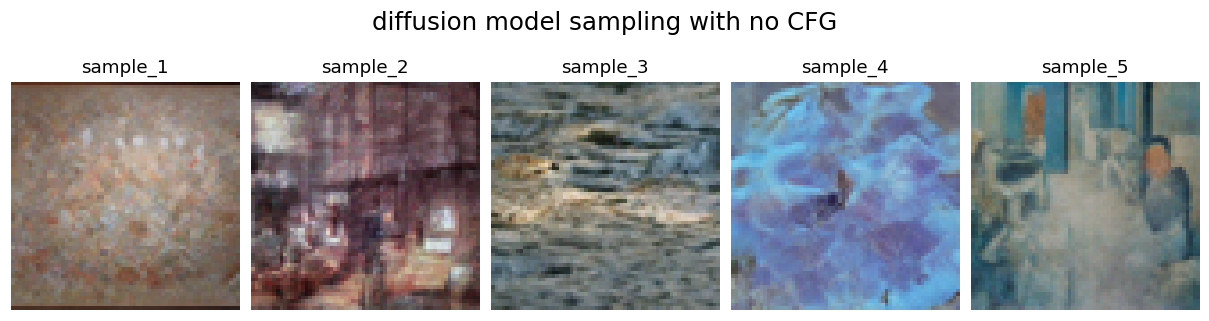
1.3 Image Generation via Iterative Sampling
Beyond image denoising, the iterative denoising function can also be used to generate images from
scratch. Instead of starting from a partially noisy image, passing pure noise as input allows the
model to synthesize a completely new image. Figure 5 shows five samples generated this way.
While the results are visually coherent, the image quality is limited — fine details and
structures are often missing without additional guidance.
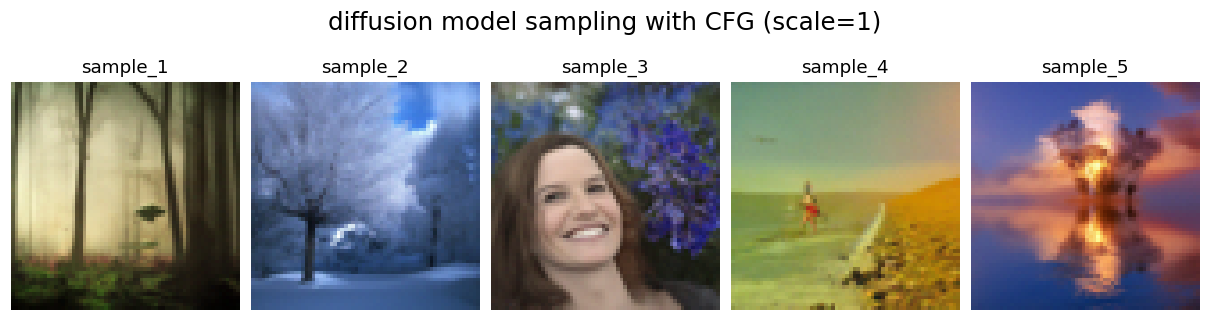
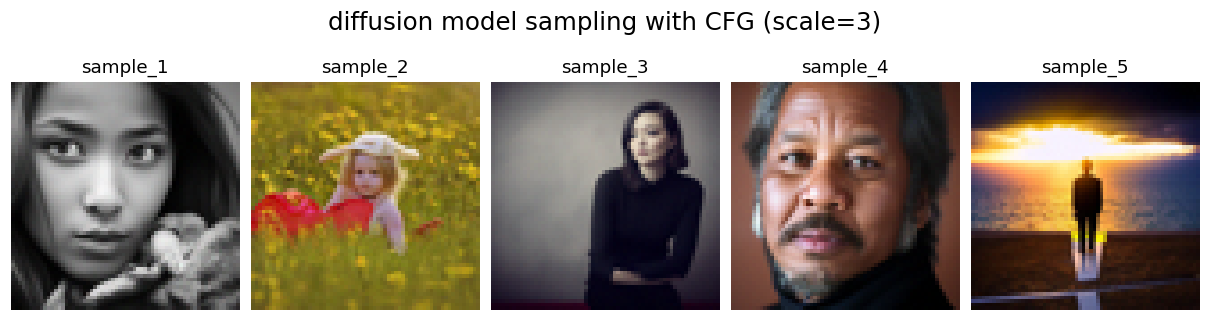
To improve image quality at the expense of diversity,
Classifier-Free Guidance (CFG)
was applied. Two noise estimates were computed: a conditional estimate \(\epsilon_c\) based on a
text prompt, and an unconditional estimate \(\epsilon_u\). The final noise estimate is then:
\[ \epsilon = \epsilon_u + \gamma (\epsilon_c - \epsilon_u) \tag{1.4} \]
where \(\gamma\) is a scale parameter controlling the guidance strength. When \(\gamma = 0\),
the estimate is fully unconditional; when \(\gamma = 1\), it is fully conditional. For
\(\gamma > 1\), the model produces noticeably sharper and higher-quality images, though the
theoretical explanation for this behaviour remains an open question. Figure 6 shows samples
generated with CFG at different values of
scale. Compared with Figure 5, the
results contain significantly more detail and structure. As
scale increases, the
images become progressively sharper, but at
scale = 7 the outputs begin to appear
over-sharpened and unnatural.
1.4 Image-to-Image Translation
Beyond denoising, diffusion models can also be applied to image editing. As discussed in
Section 1.2, adding noise to a clean image and denoising it causes the model to synthesize new
content, effectively projecting the noisy image back onto the manifold of natural images. Image
editing exploits this property: by controlling the amount of noise added, one can control the
degree of modification. The experiments in this section follow the
SDEdit algorithm.
1.4.1 Image Editing
Several clean images were noised at different levels and then denoised without text conditioning,
as shown in Figure 7. The parameter i_start controls the noise level: a lower value
corresponds to more noise added. At high i_start values (low noise), the output
remains visually close to the original while the model enriches it with finer details, improving
overall quality. Notably, it can even translate 2D cartoon images into photorealistic 3D
renderings (e.g., the avocado image). As i_start decreases and more noise is added,
the output progressively deviates from the source. Below i_start = 10, the generated
images bear little resemblance to the original.
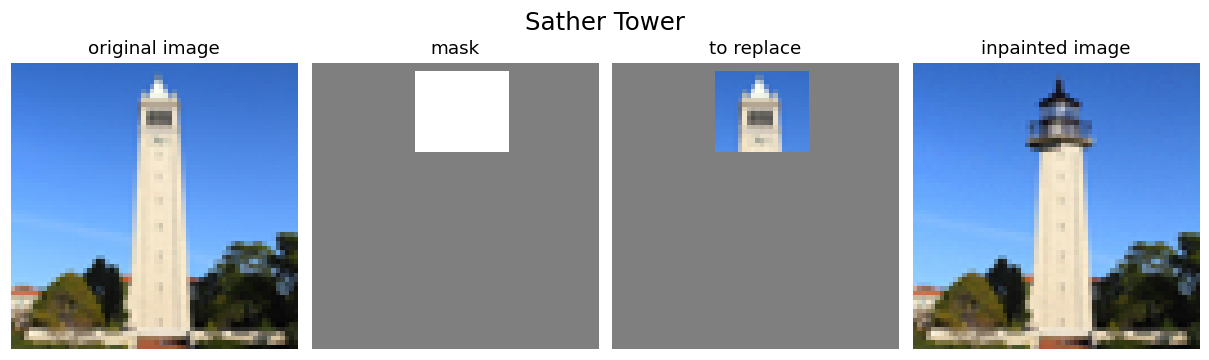
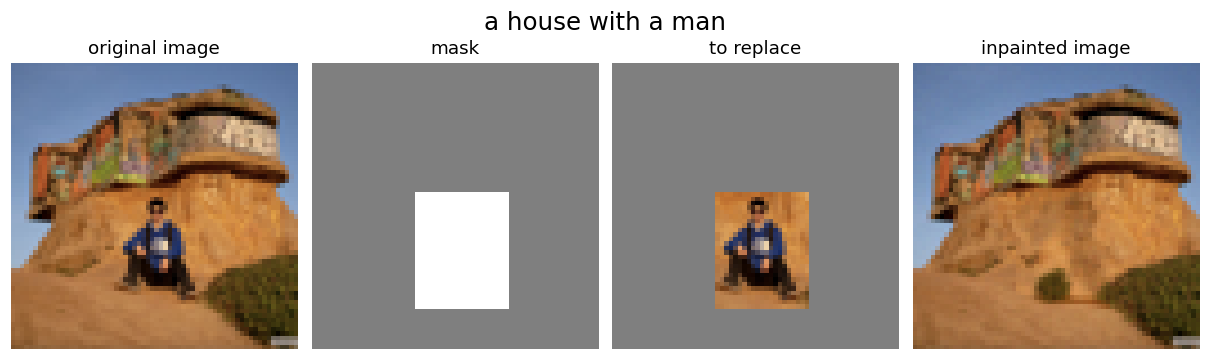
1.4.2 Image Inpainting
The same procedure was extended to image inpainting, following the
RePaint algorithm. Given an
original image \(x_\text{orig}\) and a binary mask \(\mathbf{m}\), the goal is to generate a
new image that preserves the original content wherever \(\mathbf{m} = 0\) and synthesizes new
content wherever \(\mathbf{m} = 1\).
This is achieved by running the standard denoising loop with one modification: at each timestep,
after obtaining \(x_t\), the unmasked region is replaced with the correspondingly noised version
of the original image:
\[ x_t \leftarrow \mathbf{m}\, x_t + (1 - \mathbf{m})\, \text{forward}(x_\text{orig}, t) \tag{1.5} \]
This ensures that pixels outside the mask remain consistent with \(x_\text{orig}\) at the
appropriate noise level for timestep \(t\), while pixels inside the mask are generated freely
by the diffusion model.
Figure 8 shows two images inpainted using the RePaint algorithm without text prompts. In the
first example, a mask covers the upper portion of Sather Tower, which the model replaces with
the structure of a lighthouse top. In the second, a mask covers the man in front of a house,
and the model fills the region with natural ground that blends seamlessly with the surroundings.
Both results demonstrate effective and coherent inpainting.
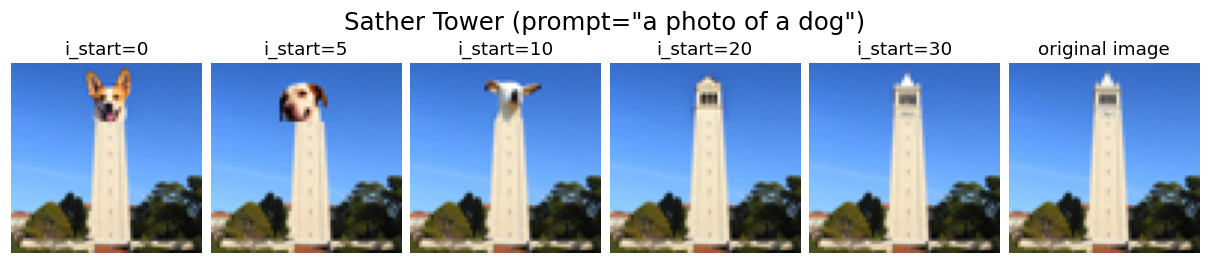
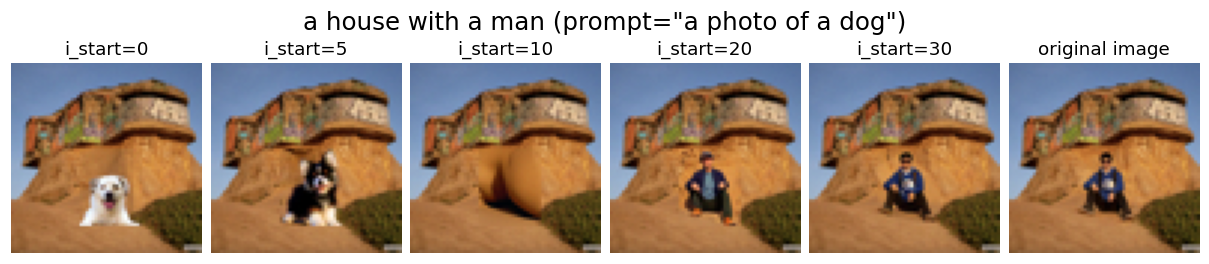
1.4.3 Text-Conditioned Image-to-Image Translation
The same inpainting procedure was applied with a descriptive text prompt —
"a photo of a dog" in this case — to steer the synthesized content toward a
specific target, as shown in Figure 9. The effect of noise level was examined by varying
i_start. At low noise levels, the output remains close to the original with only
minor detail changes, and the prompt has little visible influence. As the noise level increases
(i.e., lower i_start), the prompt-driven features become apparent: the top of
Sather Tower is replaced by a dog's head, and the man in front of the house is replaced by a
dog. In both cases, the inpainted regions blend naturally with the surrounding image, demonstrating
the effectiveness of diffusion-based image editing.
1.5 Visual Anagrams
Visual anagrams are
optical illusions generated by diffusion models that reveal different content depending on
viewing orientation or distance. The key idea is to combine noise estimates computed under
different conditions at each denoising step, so that the image satisfies two prompts
simultaneously. Three variants are explored below: flip anagrams, frequency-based anagrams,
and negative anagrams.
1.5.1 Flip Anagrams
In flip anagrams, \(x_t\) is denoised with prompt \(p_1\) to obtain \(\epsilon_1\).
Simultaneously, \(x_t\) is rotated 180° and denoised with prompt \(p_2\) to obtain
\(\epsilon_2\), which is then rotated back. The two estimates are averaged to form the final
noise estimate for the reverse step:
\[ \epsilon_1 = \text{UNet}_\text{CFG}(x_t,\, t,\, p_1) \tag{1.6} \]
\[ \epsilon_2 = \text{flip}\!\left(\text{UNet}_\text{CFG}(\text{flip}(x_t),\, t,\, p_2)\right) \tag{1.7} \]
\[ \epsilon = \frac{\epsilon_1 + \epsilon_2}{2} \tag{1.8} \]
where \(\text{flip}(\cdot)\) denotes a 180° rotation and \(p_1\), \(p_2\) are two different
text prompt embeddings. Figure 10 shows the generated images — each can be interpreted as a
distinct scene depending on viewing orientation.
1.5.2 Frequency Anagrams
Frequency-based hybrid images are generated following a similar approach to the flip anagram technique. A composite noise estimate \(\epsilon\)
is constructed by computing noise estimates under two different text prompts and combining their
frequency components: low frequencies from \(\epsilon_1\) and high frequencies from \(\epsilon_2\).
The algorithm is:
\[ \epsilon_1 = \text{UNet}_\text{CFG}(x_t,\, t,\, p_1) \tag{1.9} \]
\[ \epsilon_2 = \text{UNet}_\text{CFG}(x_t,\, t,\, p_2) \tag{1.10} \]
\[ \epsilon = f_\text{lowpass}(\epsilon_1) + f_\text{highpass}(\epsilon_2) \tag{1.11} \]
where \(f_\text{lowpass}\) and \(f_\text{highpass}\) are low-pass and high-pass filters
(implemented as Gaussian blur with kernel size 33 and \(\sigma = 2\)), and \(p_1\), \(p_2\)
are two different text prompt embeddings. The resulting image appears as one scene up close
and a different scene when viewed from a distance, as shown in Figure 11.
1.5.3 Negative Anagrams
Negative anagrams follow an analogous approach to flip anagrams, but instead of rotating the
image, the color-inverted image \(-x_t\) is used. Specifically, \(x_t\) is denoised with
prompt \(p_1\) to obtain \(\epsilon_1\). Simultaneously, the color-inverted image \(-x_t\) is
denoised with prompt \(p_2\), and the resulting estimate is negated to obtain \(\epsilon_2\).
The two are then averaged to form the final noise estimate:
\[ \epsilon_1 = \text{UNet}_\text{CFG}(x_t,\, t,\, p_1) \tag{1.12} \]
\[ \epsilon_2 = -\text{UNet}_\text{CFG}(-x_t,\, t,\, p_2) \tag{1.13} \]
\[ \epsilon = \frac{\epsilon_1 + \epsilon_2}{2} \tag{1.14} \]
where \(p_1\) and \(p_2\) are two different text prompt embeddings. Figure 12 shows the
generated negative anagrams, animated to illustrate how the perceived content changes upon
color inversion.
Part 2: Flow Matching from Scratch
Unlike the previous section, which relied on a pretrained model, this section trains
flow matching models from scratch.
The MNIST
dataset is used for its simplicity and accessibility.
MNIST is a widely used benchmark consisting of 70,000 grayscale images of handwritten digits (0–9),
each 28×28 pixels in size, split into 60,000 training and 10,000 test samples. Its small
image size and well-understood structure make it an ideal testbed for training and evaluating
generative models.
2.1 Single-Step Denoising UNet
A UNet is trained as a one-step denoiser \(D_\theta\), which maps a noisy image \(z\)
to a clean image \(x\). It is optimized over an L2 loss:
\[ L = \mathbb{E}_{z,x}\|D_\theta(z) - x\|^2 \tag{2.1} \]
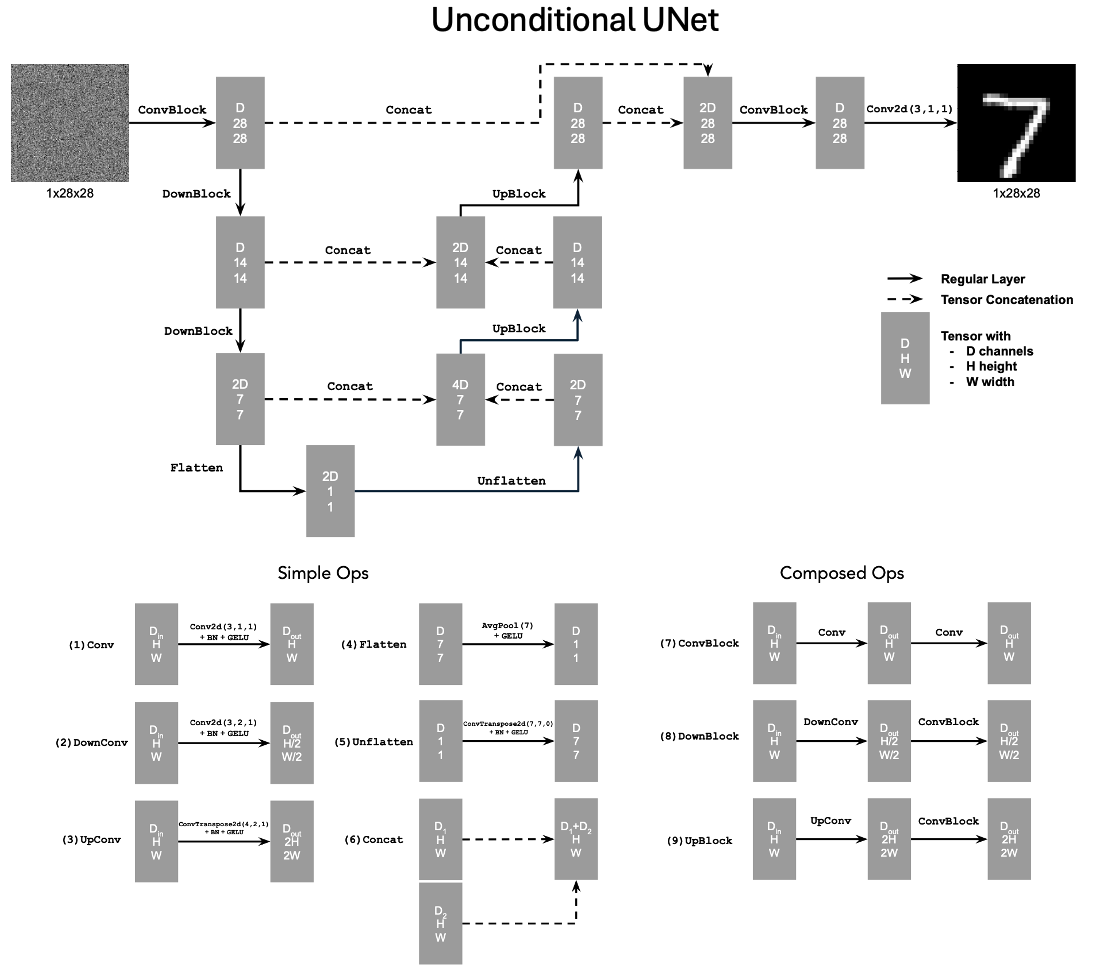
The UNet consists of downsampling, upsampling, and flatten/unflatten blocks
with skip connections, as illustrated in Figure 13.
Conv2d(kernel_size, stride, padding) is nn.Conv2d()BN is nn.BatchNorm2d()GELU is nn.GELU()ConvTranspose2d(kernel_size, stride, padding) is nn.ConvTranspose2d()AvgPool(kernel_size) is nn.AvgPool2d()D is the number of hidden channels and is a hyperparameter set during training.
At a high level, the blocks do the following:
- (1)
Conv is a convolutional layer that doesn't change the image resolution, only the channel dimension.
- (2)
DownConv is a convolutional layer that downsamples the tensor by 2.
- (3)
UpConv is a convolutional layer that upsamples the tensor by 2.
- (4)
Flatten is an average pooling layer that flattens a 7x7 tensor into a 1x1 tensor. 7 is the resulting height and width after the downsampling operations.
- (5)
Unflatten is a convolutional layer that unflattens/upsamples a 1x1 tensor into a 7x7 tensor.
- (6)
Concat is a channel-wise concatenation between tensors with the same 2D shape. This is simply torch.cat().
Composed operations are built from simple operations in order to make the network
deeper. This doesn't change the tensor's height, width, or number of channels, but simply
adds more learnable parameters.
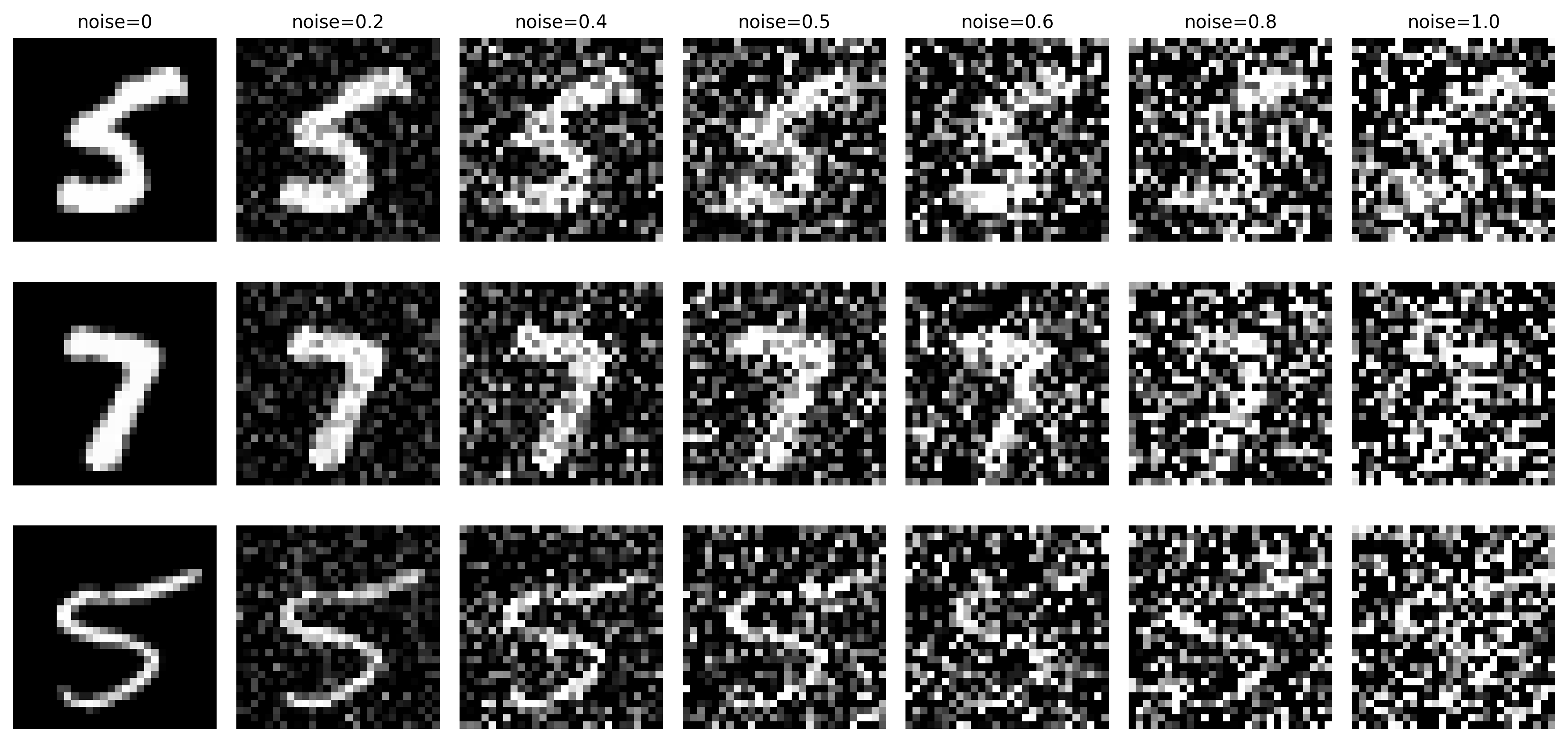
2.1.1 Noising MNIST Digits
To train the denoiser, data pairs \((z, x)\) are constructed by corrupting clean MNIST
digits \(x\) with Gaussian noise according to the following process:
\[ z = x + \sigma\epsilon, \quad \text{where } \epsilon \sim \mathcal{N}(0, I) \tag{2.2} \]
Figure 14 visualizes the effect of different noise levels \(\sigma = [0.0, 0.2, 0.4, 0.5, 0.6, 0.8, 1.0]\)
on normalized inputs \(x \in [0, 1]\). As expected, image quality degrades progressively with increasing \(\sigma\).
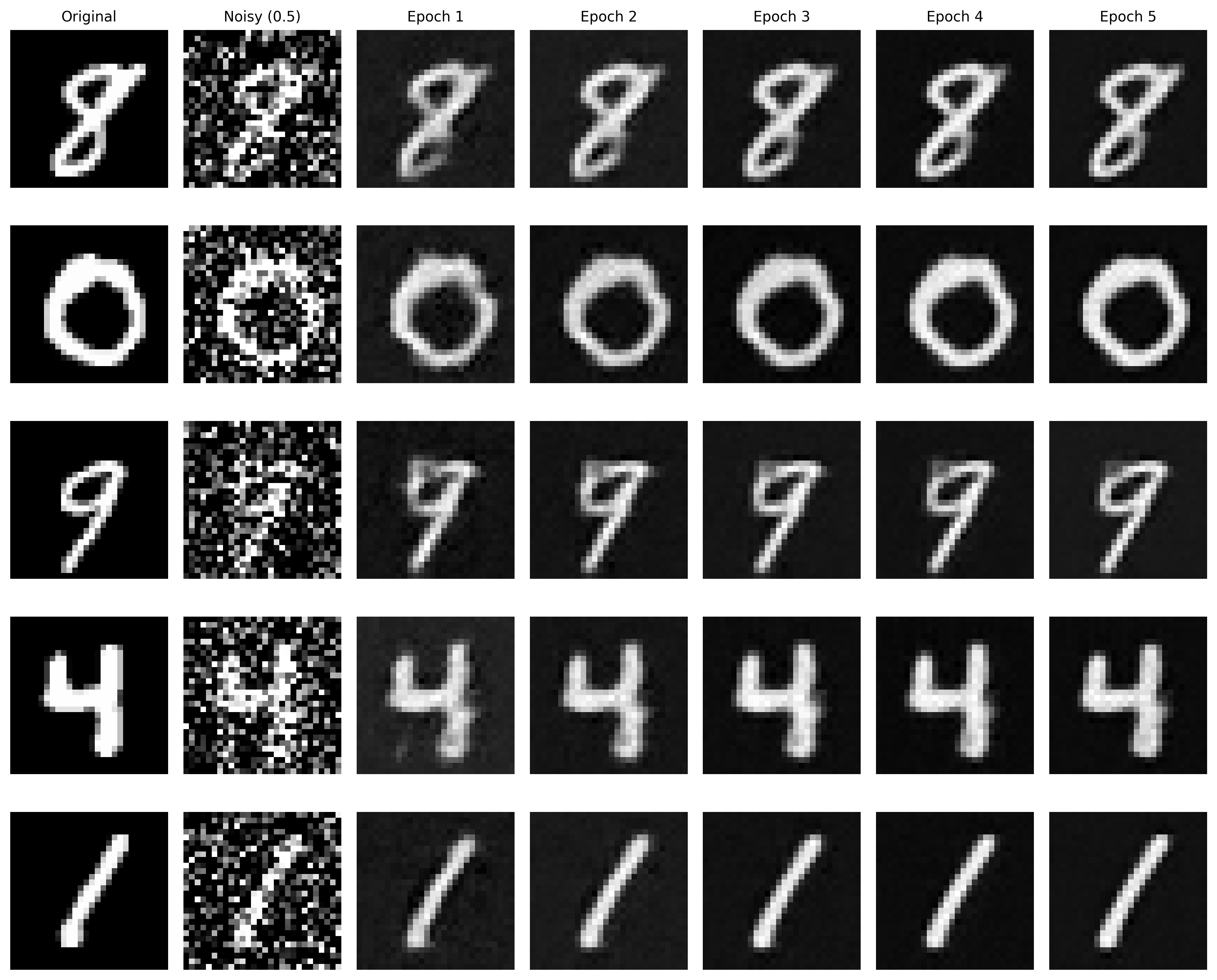
2.1.2 Training
The denoiser was trained to recover clean images \(x\) from noisy inputs \(z\) at a fixed noise
level of \(\sigma = 0.5\). The MNIST training split was loaded via
torchvision.datasets.MNIST with shuffling enabled and a batch size of 256.
Noise was applied on-the-fly at each batch fetch, ensuring the network saw a fresh random
\(\epsilon\) at every iteration and improving generalization. The UNet from Section 2.1 was
used with hidden dimension D = 128 and optimized with Adam at a learning rate
of 1e-4 for 5 epochs. Denoised results on the test set were recorded after the 1st and 5th
epoch to track reconstruction quality over training.
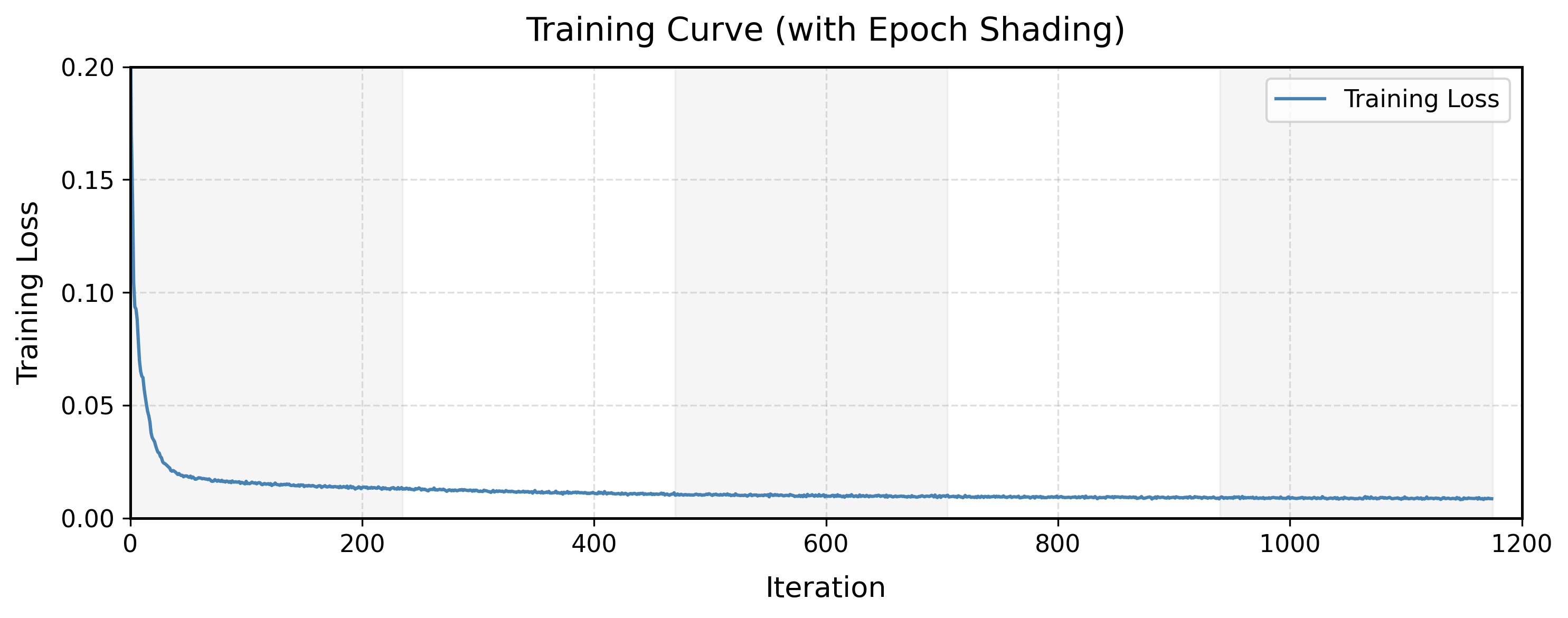
Figures 15 and 16 show the training loss curve and denoised outputs at each epoch, respectively.
The model converges rapidly within the first 50 iterations; beyond that, the loss continues to
decrease but at a much slower rate. This trend is consistent with the visual results: after
epoch 1 the denoised images are already recognizable, and the improvement in image quality from
epoch 2 to epoch 5 is marginal.
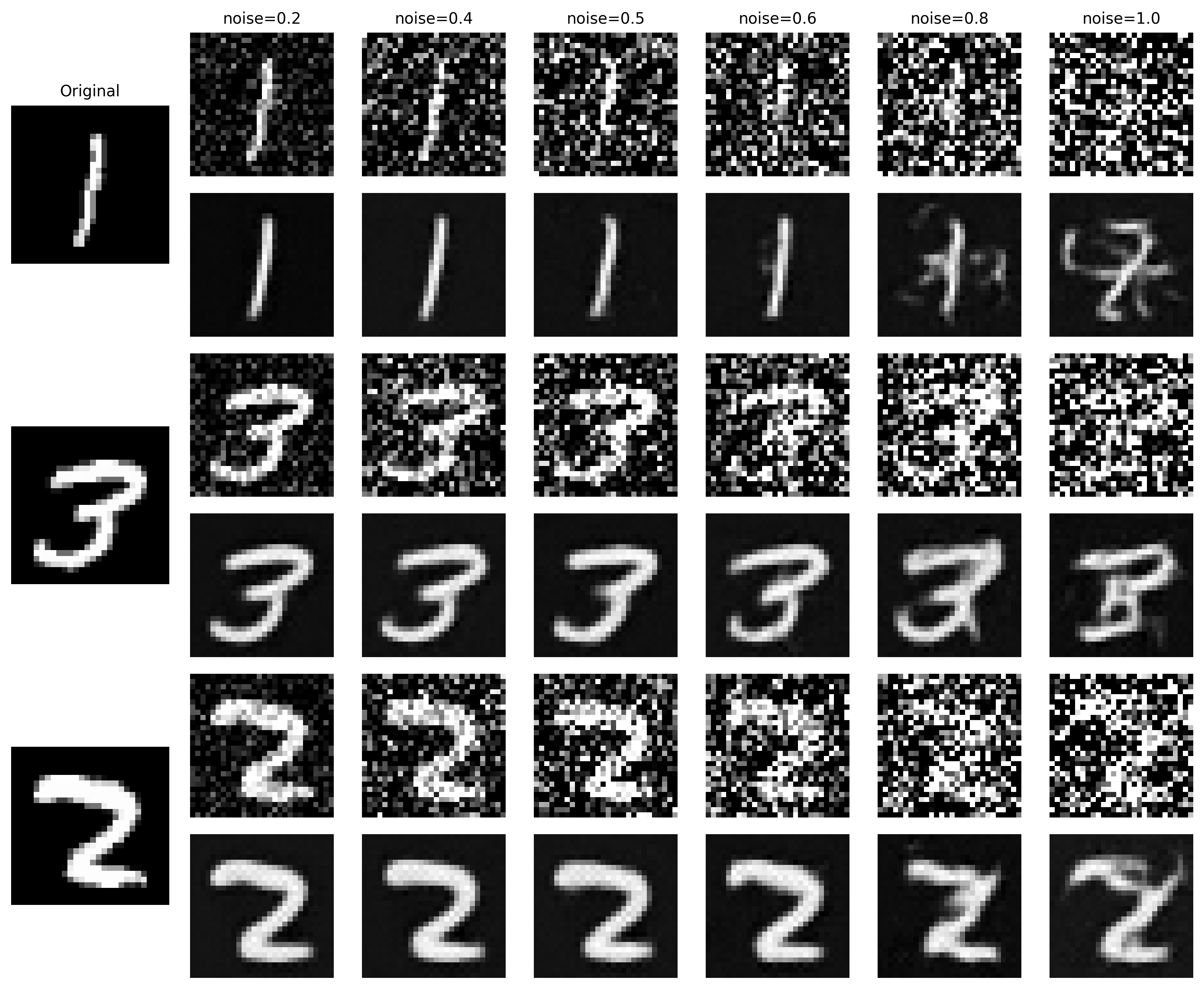
2.1.3 Out-of-Distribution Testing
Since the denoiser was trained exclusively at \(\sigma = 0.5\), it was evaluated on MNIST digits
corrupted at out-of-distribution noise levels \(\sigma \in \{0.2, 0.4, 0.5, 0.6, 0.8, 1.0\}\)
to assess generalization, as shown in Figure 17. The denoiser performs well for noise levels up
to 0.6, producing clean and recognizable reconstructions. At \(\sigma = 0.8\) and \(\sigma = 1.0\),
however, the outputs deteriorate significantly and are largely unrecognizable. This is expected,
as the model was never exposed to such high noise levels during training.
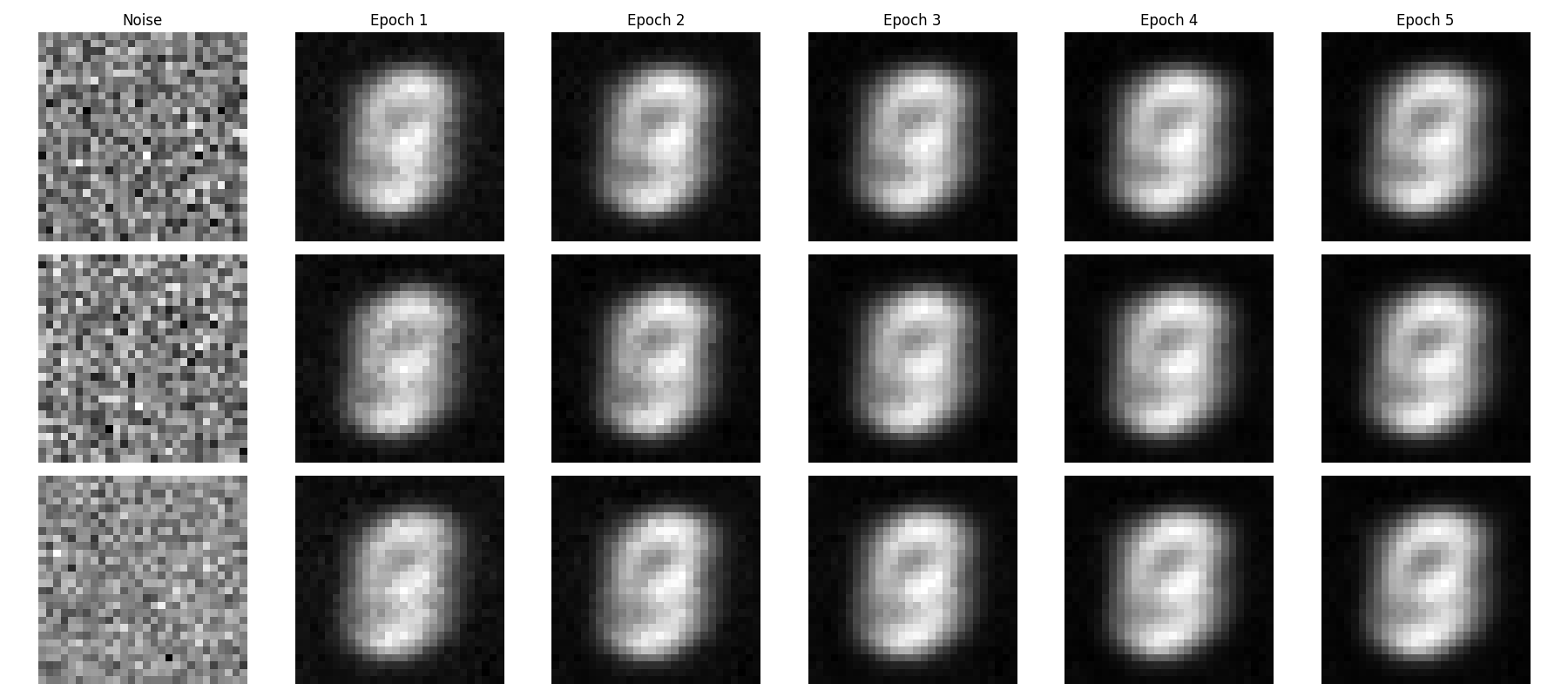
2.1.4 Denoising Pure Noise
The denoiser was further applied to pure Gaussian noise \(z = \epsilon\),
\(\epsilon \sim \mathcal{N}(0, \mathbf{I})\), treating generation as a denoising problem with
no structured input. The model was trained under the same setup as Section 2.1.2 for 5 epochs,
and outputs after the 1st and 5th epoch are shown in Figure 18.
A striking observation is that all generated images are nearly identical, regardless of the
noise sample drawn. This can be explained theoretically. Under the MSE loss
\(\mathcal{L} = \mathbb{E}_{z,x}[\|D_\theta(z) - x\|^2]\), the optimal denoiser is the
conditional expectation:
\[ D_\theta^*(z) = \mathbb{E}[X \mid Z]. \]
Since \(Z \sim \mathcal{N}(0, \mathbf{I})\) carries no information about
\(X \sim \mathcal{D}_\text{MNIST}\), the two are statistically independent (\(Z \perp X\)),
which gives:
\[ \mathbb{E}[X \mid Z] = \mathbb{E}[X]. \]
The optimal denoiser therefore collapses to a constant function:
\[ D_\theta^*(z) : Z \to \mathbb{E}[X]. \]
Because MNIST digits are spatially aligned and share a common scale, \(\mathbb{E}[X]\) is a
weighted average over all digit classes in which shared structural elements are reinforced,
producing the blurred, digit-like image seen in Figure 18.
2.2 The Flow Matching Model
As shown in Section 2.1, one-step denoising does not work well for generative tasks. Instead,
flow matching is adopted to
iteratively denoise from noise to a clean image. A UNet \(u_\theta(x_t, t)\) is trained to
predict the flow — the velocity field guiding noisy samples toward the clean data
distribution. In this setup, a pure noise image \(x_0 \sim \mathcal{N}(0, I)\) is gradually
transformed into a realistic image \(x_1\).
Intermediate noisy samples are constructed via linear interpolation between the noise \(x_0\)
and the clean image \(x_1\):
\[ x_t = (1 - t)x_0 + t x_1 \quad \text{where } x_0 \sim \mathcal{N}(0, 1),\ t \in [0, 1]. \tag{2.3} \]
This defines a vector field describing the position of a point \(x_t\) at time \(t\) as it
moves from the noisy distribution \(p_0(x_0)\) toward the clean data distribution \(p_1(x_1)\).
For small \(t\), the sample remains close to noise; as \(t\) increases, it approaches the
clean distribution.
The flow \(u(x_t, t)\) is the velocity of this vector field — the rate of change of \(x_t\)
with respect to time:
\[ u(x_t, t) = \frac{d}{dt} x_t = x_1 - x_0. \tag{2.4} \]
A UNet \(u_\theta(x_t, t)\) is trained to approximate this flow, yielding the learning
objective:
\[ L = \mathbb{E}_{x_0 \sim p_0(x_0),\, x_1 \sim p_1(x_1),\, t \sim U[0,1]} \|(x_1 - x_0) - u_\theta(x_t, t)\|^2. \tag{2.5} \]
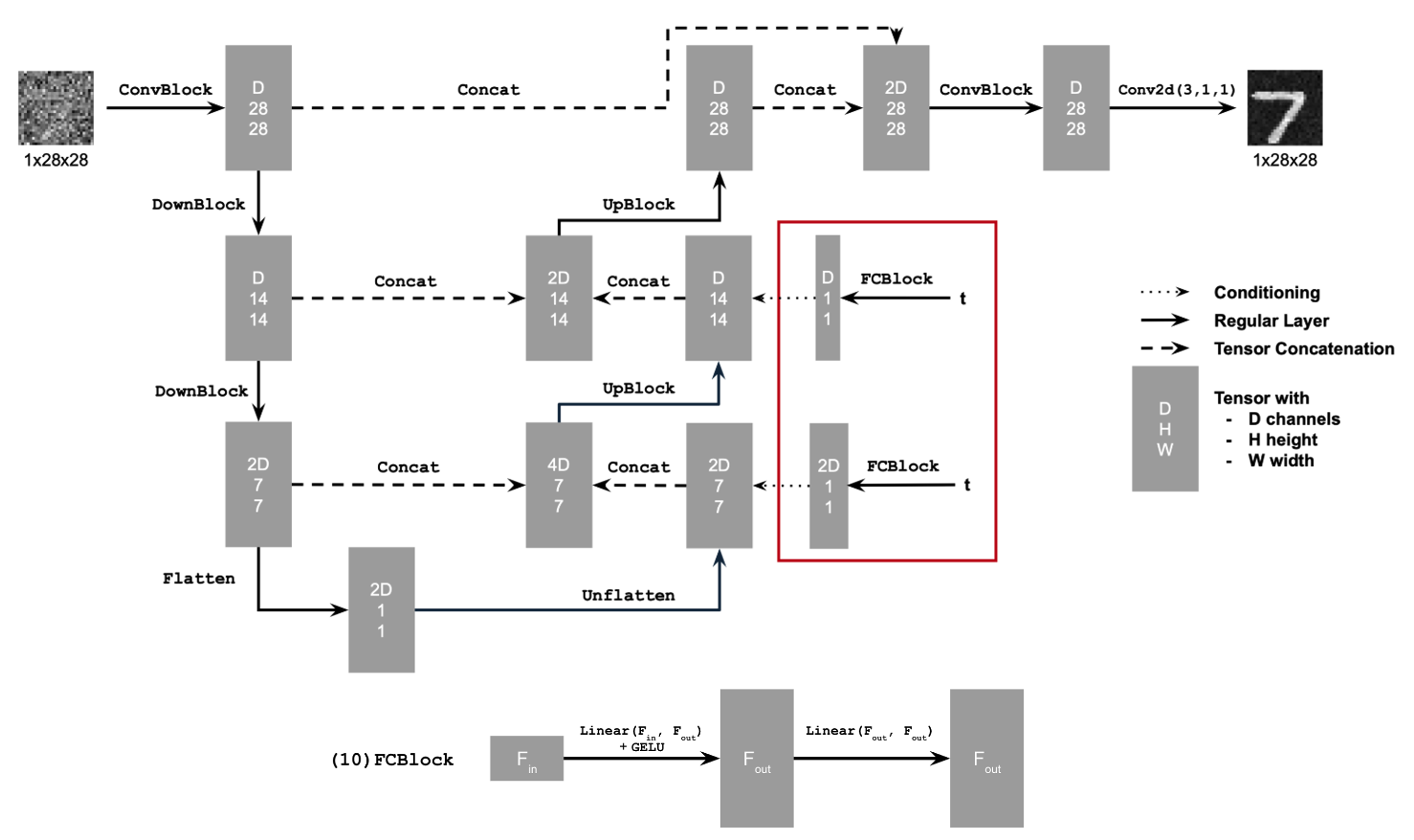
2.2.1 Adding Time Conditioning to UNet
To condition the UNet on timestep \(t\), a new FCBlock (fully-connected block) operator was
introduced to inject the conditioning signal, as shown in Figure 19. Rather than predicting the
original image, the model predicts the flow from noisy \(x_0\) to clean \(x_1\), encoding both
the image structure and the noise to be removed. Each FCBlock is implemented as
Linear(F_in, F_out) via nn.Linear, where F_in = 1 since
the conditioning signal \(t\) is a scalar. The pseudo code below shows how \(t\) is embedded
and used to modulate intermediate feature maps.
fc1_t = FCBlock(...)
fc2_t = FCBlock(...)
# the t passed in here should be normalized to be in the range [0, 1]
t1 = fc1_t(t)
t2 = fc2_t(t)
# Follow diagram to get unflatten.
# Replace the original unflatten with modulated unflatten.
unflatten = unflatten * t1
# Follow diagram to get up1.
...
# Replace the original up1 with modulated up1.
up1 = up1 * t2
# Follow diagram to get the output.
...
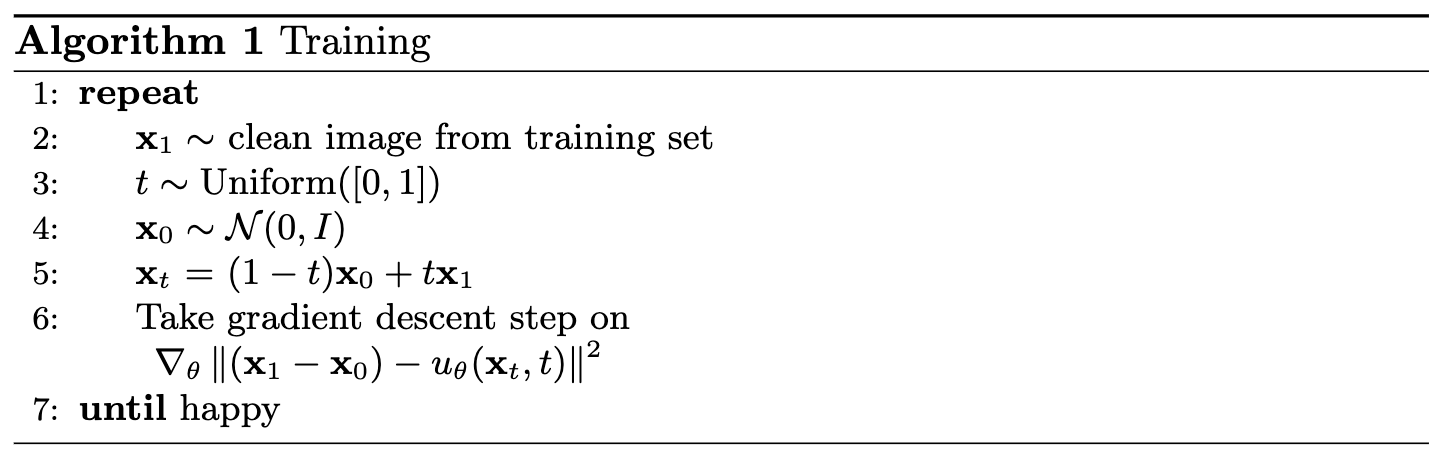
2.2.2 Training the UNet
The time-conditioned UNet \(u_\theta(x_t, t)\) was trained to predict the flow \(x_1 - x_0\)
at intermediate timesteps following Algorithm 1 in Figure 20. At each iteration, a clean image \(x_1\) and
a timestep \(t \sim U[0,1]\) were randomly sampled, noise \(x_0 \sim \mathcal{N}(0, I)\) was
drawn, and the interpolated sample \(x_t\) was computed and fed to the model. The MNIST training
set was loaded via torchvision.datasets.MNIST with shuffling enabled and a batch
size of 64, with noise applied on-the-fly at each fetch. The UNet from Section 2.2.1 was used
with hidden dimension D = 64, with the conditioning signal \(t\) normalized to
\([0, 1]\) before injection. The model was optimized with Adam at an initial learning rate of
1e-2, with an exponential decay scheduler
\(\gamma = 0.1^{(1.0/\text{num\_epochs})}\) applied after each epoch via
torch.optim.lr_scheduler.ExponentialLR(...).
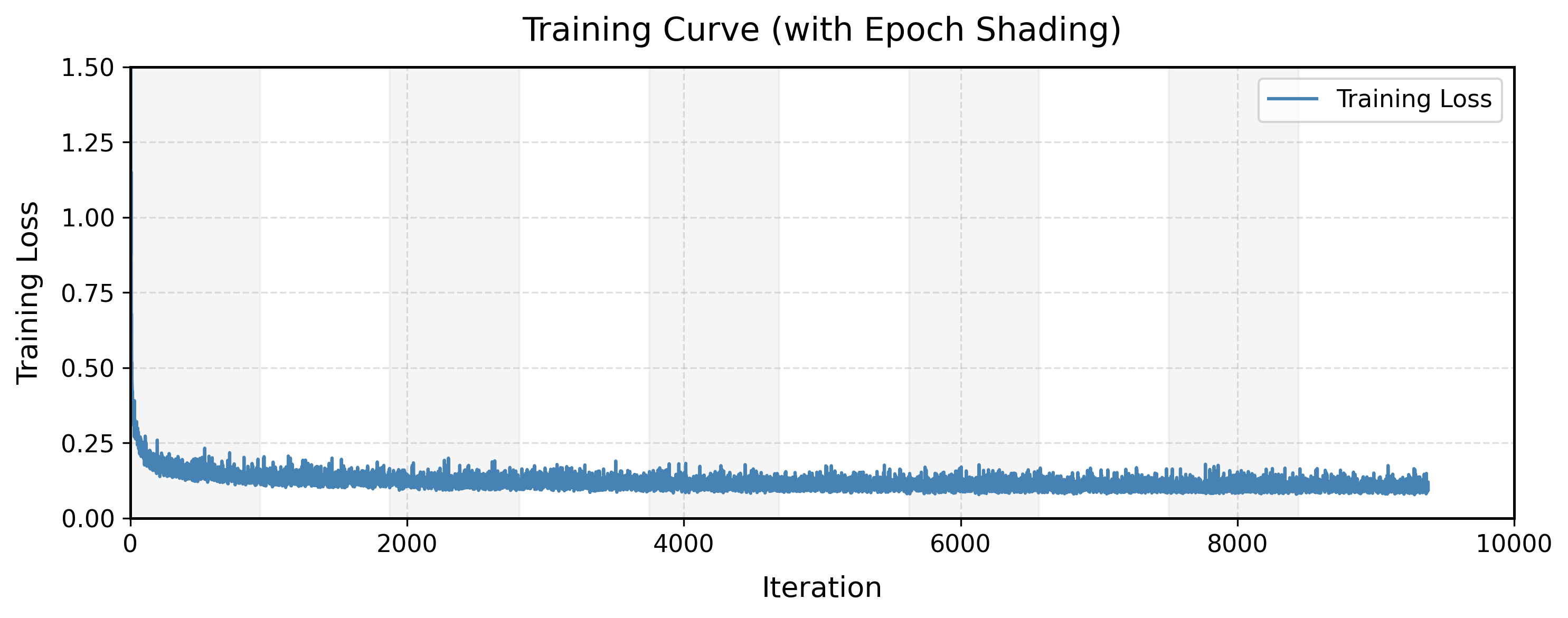
Figure 21 shows the training loss curve, indicating rapid convergence within the first 100 iterations; beyond
that, the loss continues to decrease but at a much slower rate. The model improvement from epoch 2 to epoch 10 is marginal.
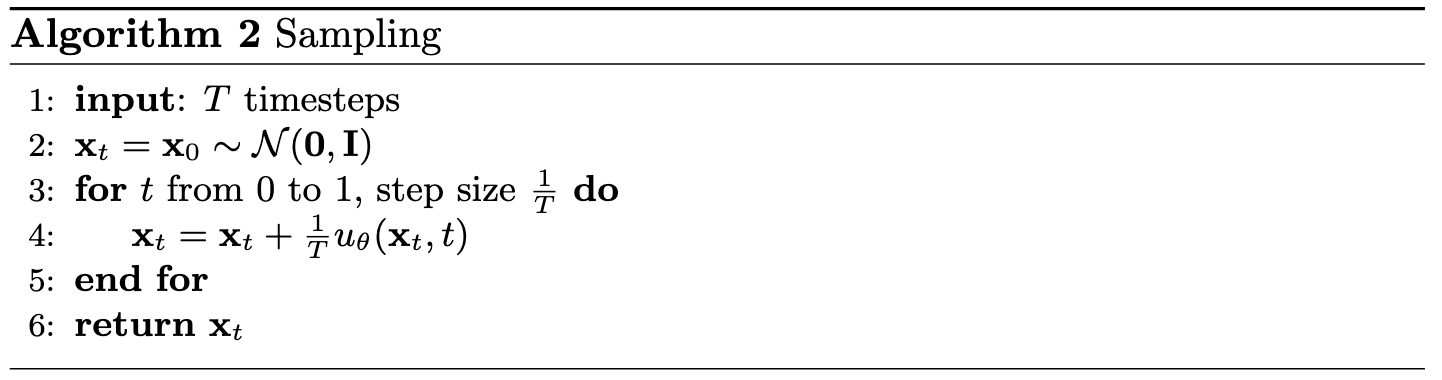
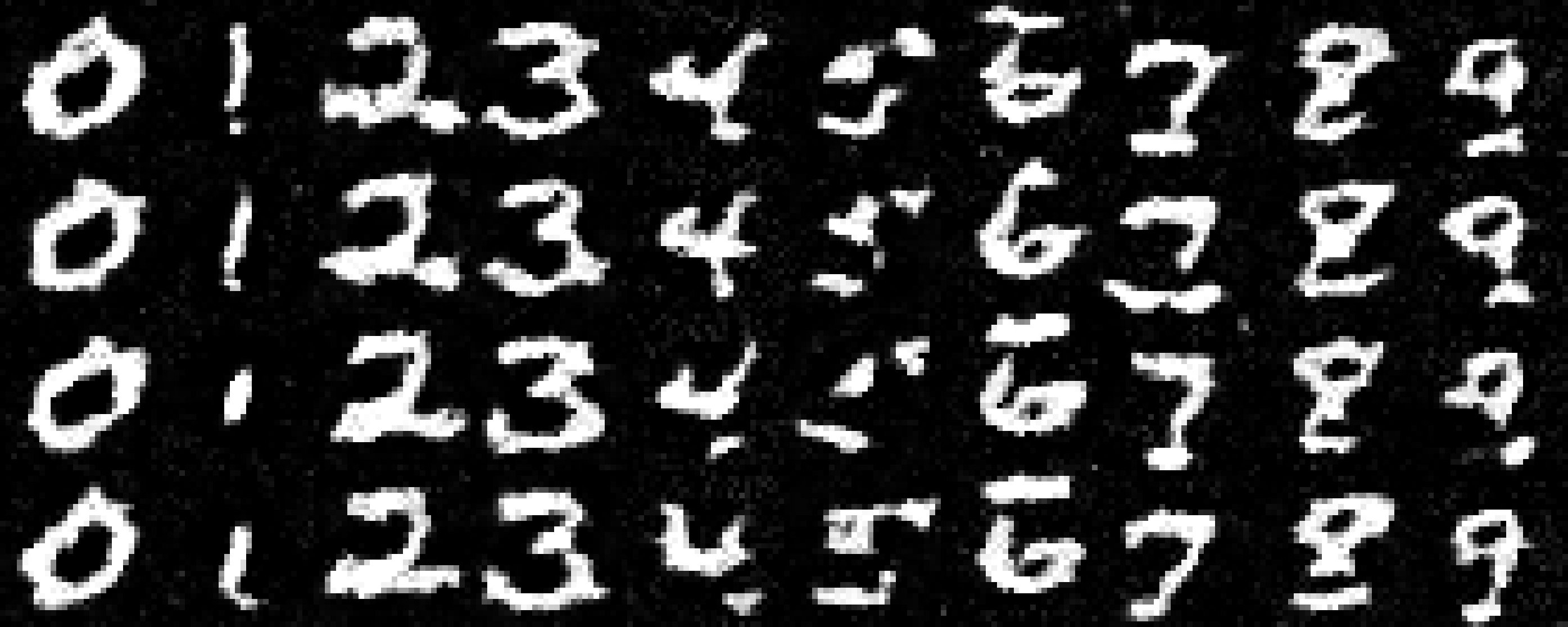
2.2.3 Image Sampling
Once trained, the time-conditioned UNet was used to generate images by iteratively denoising
pure Gaussian noise. The sampling procedure follows Algorithm 2 (Figure 22), which applies a
simple Euler method with a fixed step size of \(1/T\) over \(T = 50\) steps.
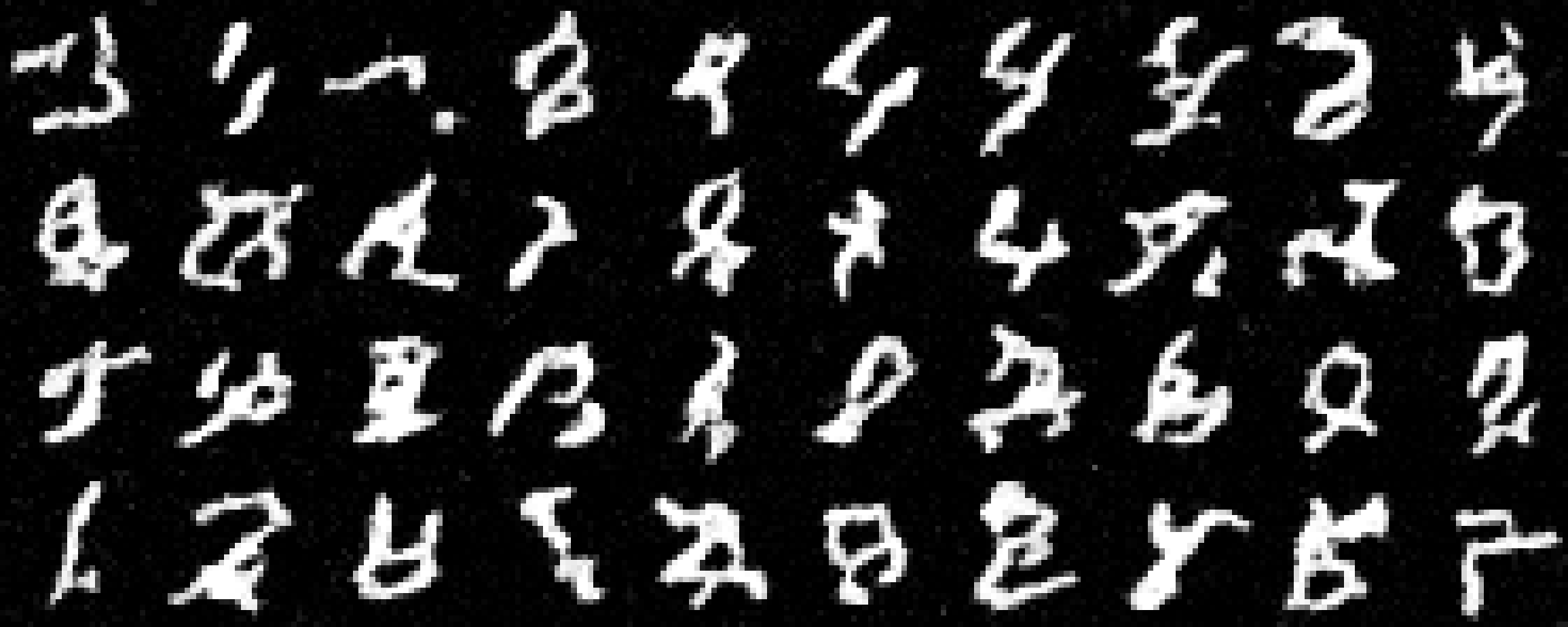
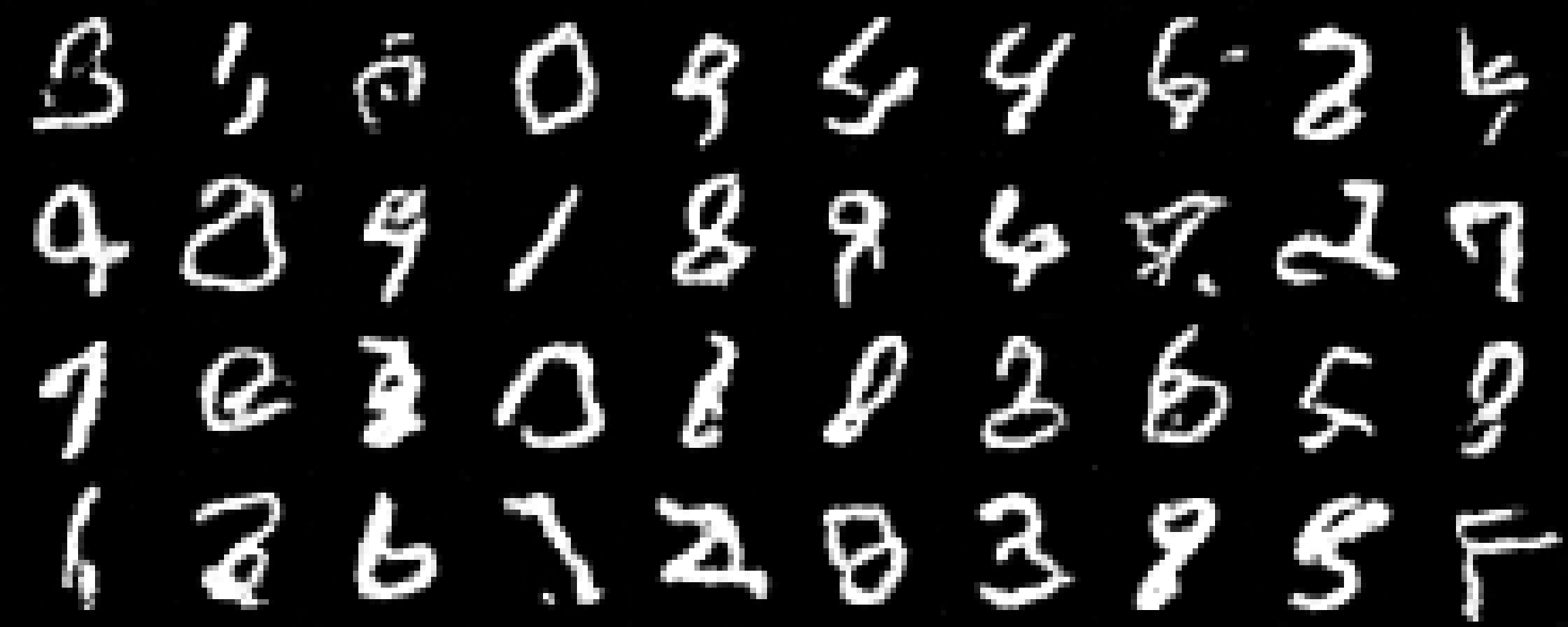
Figure 23 shows generated samples at epochs 1, 5, and 10. The model progressively learns to
produce more realistic and diverse digits as training advances. While some visual artifacts persist, the results are substantially more coherent than those from the one-step denoiser.
2.3 Class-Conditioned Flow Matching
To improve denoising quality and enable explicit control over the output, the UNet was further
conditioned on the digit class (0–9) in addition to the timestep \(t\). This required adding
two more FCBlocks to inject the class signal \(c\), represented as a one-hot vector rather than
a scalar. To retain unconditional generation capability — analogous to classifier-free guidance
in Part 1 — dropout was applied to the class conditioning: with probability
\(p_\text{uncond} = 0.1\), the class vector \(c\) was set to zero during training, allowing the
model \(u_\theta(x_t, t, c)\) to operate without class information.
The pseudo code below shows how both \(t\) and \(c\) are embedded and used to modulate the
intermediate feature maps:
fc1_t = FCBlock(...)
fc1_c = FCBlock(...)
fc2_t = FCBlock(...)
fc2_c = FCBlock(...)
t1 = fc1_t(t)
c1 = fc1_c(c)
t2 = fc2_t(t)
c2 = fc2_c(c)
# Follow diagram to get unflatten.
# Replace the original unflatten with modulated unflatten.
unflatten = c1 * unflatten + t1
# Follow diagram to get up1.
...
# Replace the original up1 with modulated up1.
up1 = c2 * up1 + t2
# Follow diagram to get the output.
...
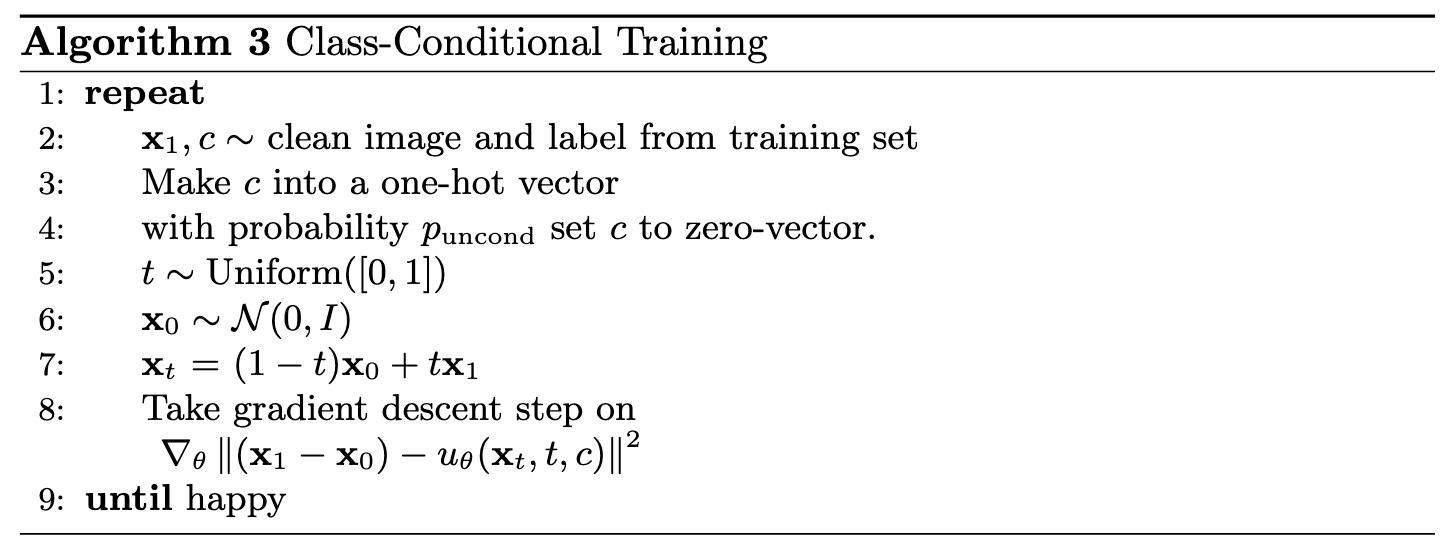
2.3.1 Training the Class-Conditioned UNet
Training the class-conditioned UNet followed the same procedure as the time-conditioned model
in Section 2.2.2, with one key addition: the class conditioning vector \(c\) was injected
alongside \(t\), and unconditional generation was applied periodically by zeroing out \(c\)
with probability \(p_\text{uncond} = 0.1\), following Algorithm 3 (Figure 24).
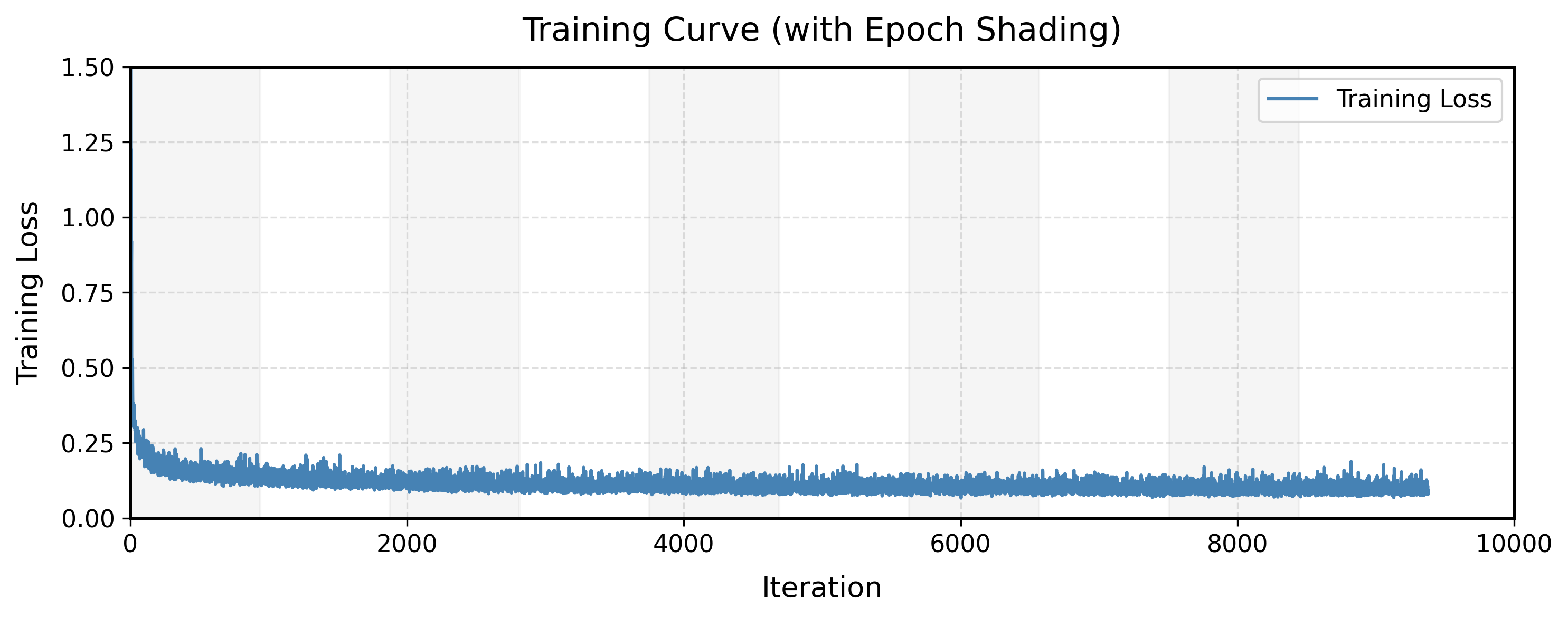
The resulting training loss curve is shown in Figure 25.
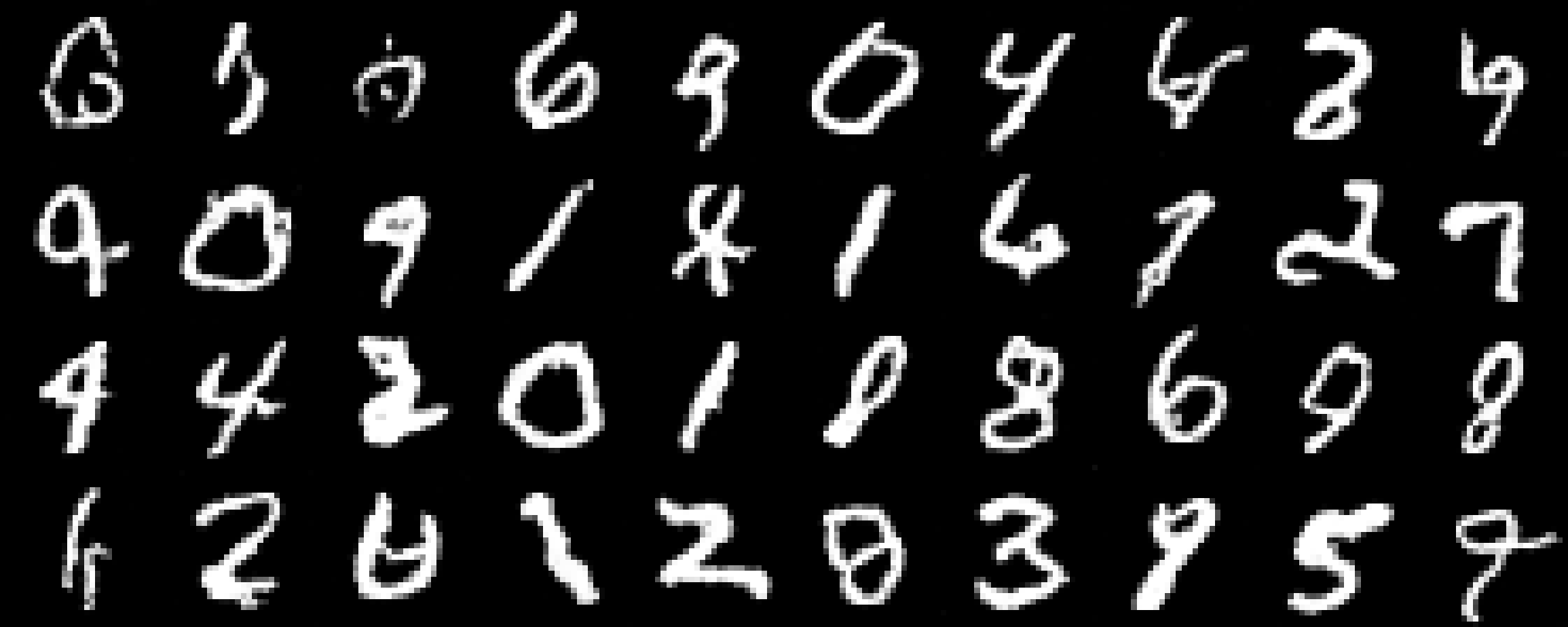
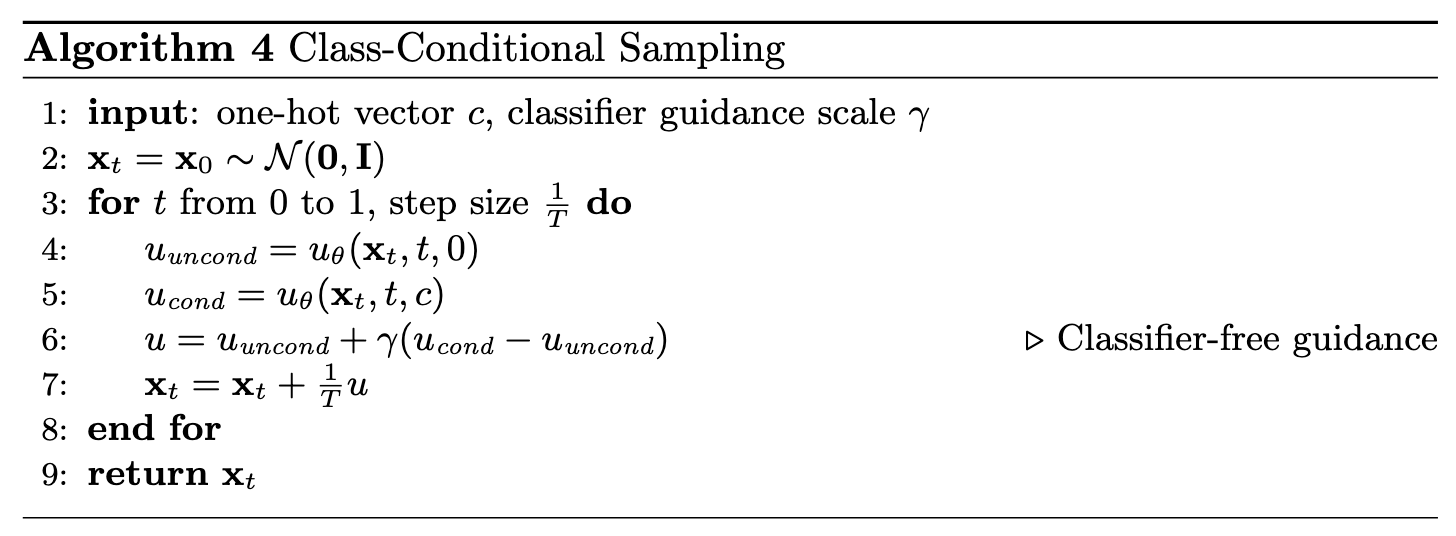
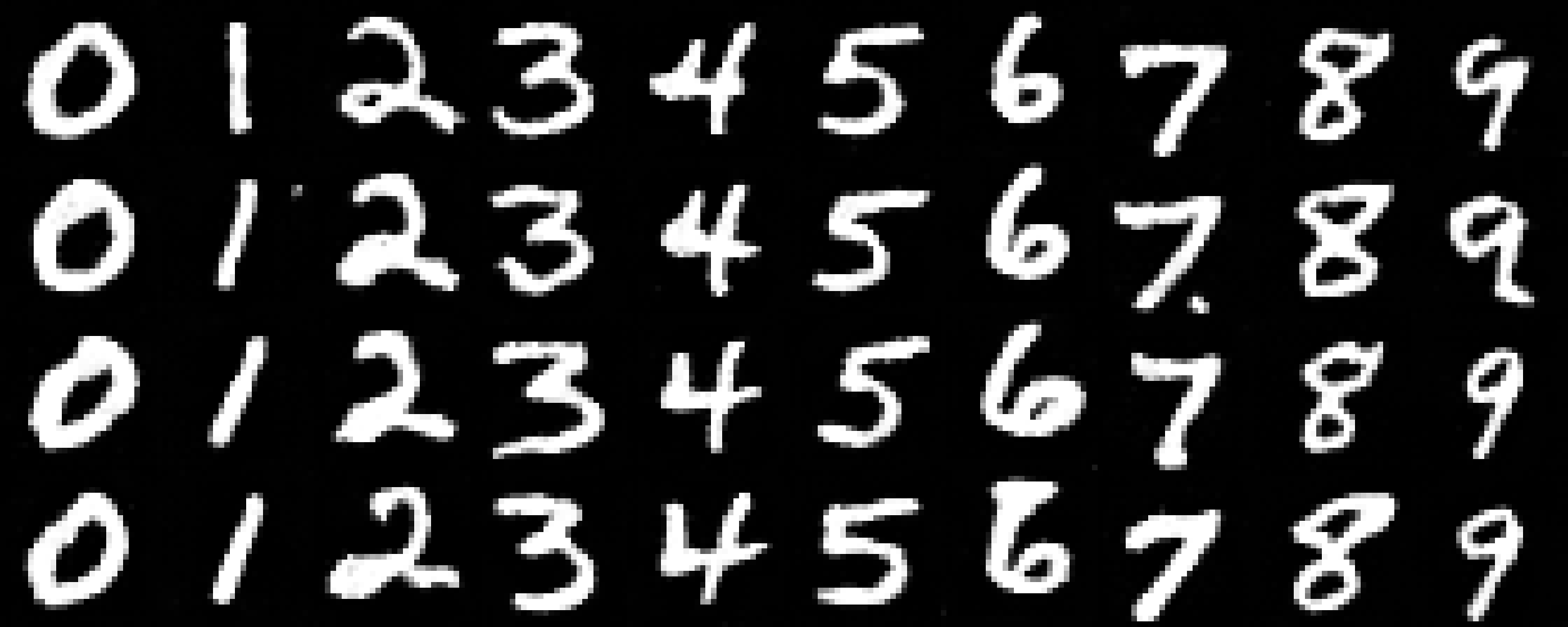
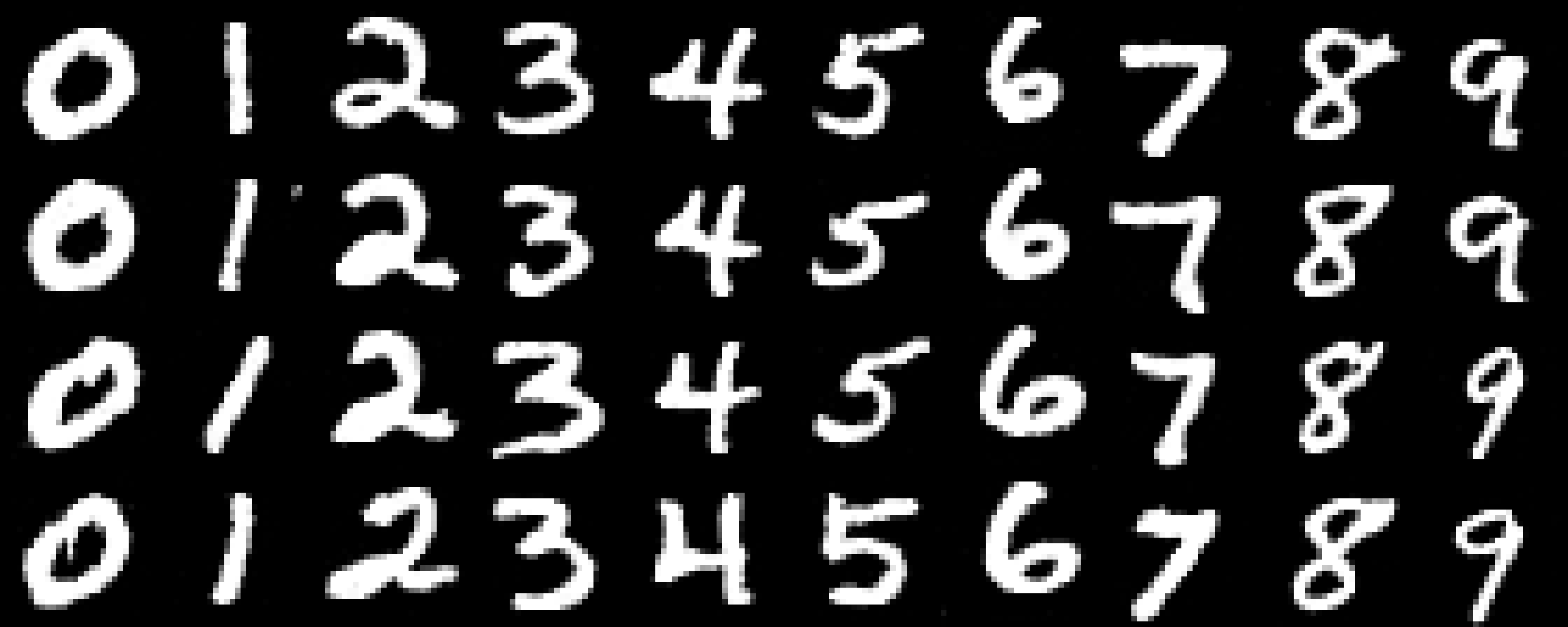
2.3.2 Sampling from the Class-Conditioned UNet
The class-conditioned model was used to generate images via classifier-free guidance (CFG),
following Algorithm 4 (Figure 26). A guidance scale of \(\gamma = 5.0\) was applied during
sampling to steer the outputs toward the target class and enhance overall generation quality.
Figure 27 shows generated samples at epochs 1, 5, and 10. The class-conditioned model with
CFG produces noticeably sharper and more recognizable digits compared to the time-conditioned
model alone, confirming the benefit of explicit class conditioning for generation quality.
Conclusion
This project examined diffusion and flow matching models at two levels of abstraction — through a
large-scale pretrained model and through models trained from scratch on a simple benchmark.
In Part 1, experiments with DeepFloyd IF confirmed that iterative diffusion denoising substantially
outperforms classical Gaussian blur, recovering fine structural details lost during the forward noising
process. One-step denoising performs well at low to moderate noise but begins to hallucinate at high
levels; iterative denoising further improves quality while exhibiting the same tendency. Classifier-Free
Guidance proved effective at improving generation quality, with guidance scales above 1 producing sharper
results at the cost of output diversity. The SDEdit and RePaint algorithms demonstrated versatile image
editing and inpainting capabilities, and the visual anagram experiments showed that diffusion models can
be guided to simultaneously satisfy multiple semantic constraints within a single image.
In Part 2, the limitations of one-step MSE denoising for generation were characterized theoretically:
when applied to pure noise, the optimal MSE-trained denoiser reduces to the dataset mean due to the
statistical independence of the noise and data distributions. Flow matching overcame this limitation by
training a time-conditioned UNet to predict a velocity field along a linear interpolation path, enabling
iterative synthesis of diverse, coherent digits. Adding class conditioning with CFG dropout further
improved output sharpness and semantic consistency, yielding recognizable class-specific digits by epoch 5.
Together, the two parts illustrate both the power of pretrained diffusion models and the principled
design choices that make training generative models from scratch effective.
References
- Ho et al., Denoising Diffusion Probabilistic Models, NeurIPS 2020. [arXiv]
- Saharia et al., Photorealistic Text-to-Image Diffusion Models with Deep Language Understanding, NeurIPS 2022. [arXiv]
- Song et al., Denoising Diffusion Implicit Models, ICLR 2021. [arXiv]
- Ho & Salimans, Classifier-Free Diffusion Guidance, NeurIPS Workshop 2021. [arXiv]
- Meng et al., SDEdit: Guided Image Synthesis and Editing with Stochastic Differential Equations, ICLR 2022. [arXiv]
- Lugmayr et al., RePaint: Inpainting using Denoising Diffusion Probabilistic Models, CVPR 2022. [arXiv]
- Geng et al., Visual Anagrams: Generating Multi-View Optical Illusions with Diffusion Models, CVPR 2024. [arXiv]
- Lipman et al., Flow Matching for Generative Modeling, ICLR 2023. [arXiv]